





























done carefully and may require some iterations, specially if the beacon is received with a low
C/N. A good starting value for the threshold is 10 dB below the nominal receive level or 2 dB
above the noise floor the beacon receiver sees with a depointed antenna, whatever value is
higher.To turn off the monitoring of the beacon level (this in fact inhibits the adaptive
tracking), simply set the threshold the a very low value (e.g. -99 dBm)
Smoothinginterval --- This parameter controls the smoothing function. Setting it to zero
disables smoothing. Smoothing lets the ACU point the antenna to positions evaluated from a
simple model calculated from the step track peaks of the recent few hours. A detailed
description of this function you find at chapter
'8.3.3 Smoothing'
Peakjitterthreshold --- If the jitter value of at least one axis exceeds this threshold, the ACU
raises an 'model fault'. If this happens three consecutive times, the ACU resets the models of
both axes. Adaptive tracking will be possible not until 6 hours after this happens.During
adaptive tracking, the ACU evaluates for each axis a figure called jitter. The jitter value
describes standard deviation of the measured peak positions with respect to the positions
calculated from the (currently selected) model. The figure is also expressed as a percentage
of the antenna's beamwidth, low values indicate, that the model ideally describes the
antenna's path. High values indicate that's something wrong. The step track results may be
to noisy at low amplitudes or the model does not fit at all. This may be the case if a satellite
gets repositioned in the orbit.A typical threshold value is 20%, this will detect very early that
a model does not fit to describe the satellite's motion. If this value causes false alarms too
often, you may want to raise the threshold to 50%. Setting it to 0 switches the threshold
monitoring completely off.
AZMaximummodeltype ELMaximummodeltype --- These settings let you limit the
adaptive model to a simpler one, the ACU would choose by itself. The maximum model type
can be set individually for each axis. Normally you will set both axes to 'LARGE', which
leaves the model selection fully to the ACU's internal selection algorithms.In cases where the
ACU seems to be too 'optimistic' about the quality of the step track results, the maximum
model on one or both axes may be limited to a more simple and more noise-resistant model.
Specially inclined orbit satellites which are located close to the longitude of the antenna's
geodetic location may require this limitation for the azimuth axis. With such a satellite, the
elevation may move several degrees while the azimuth shows almost no motion.
Please refer to chapter
8.3 Steptrack
,
8.4 Adaptive Tracking
and
8.5 Program Tracking
for more
detailed informations about the tracking algorithms.
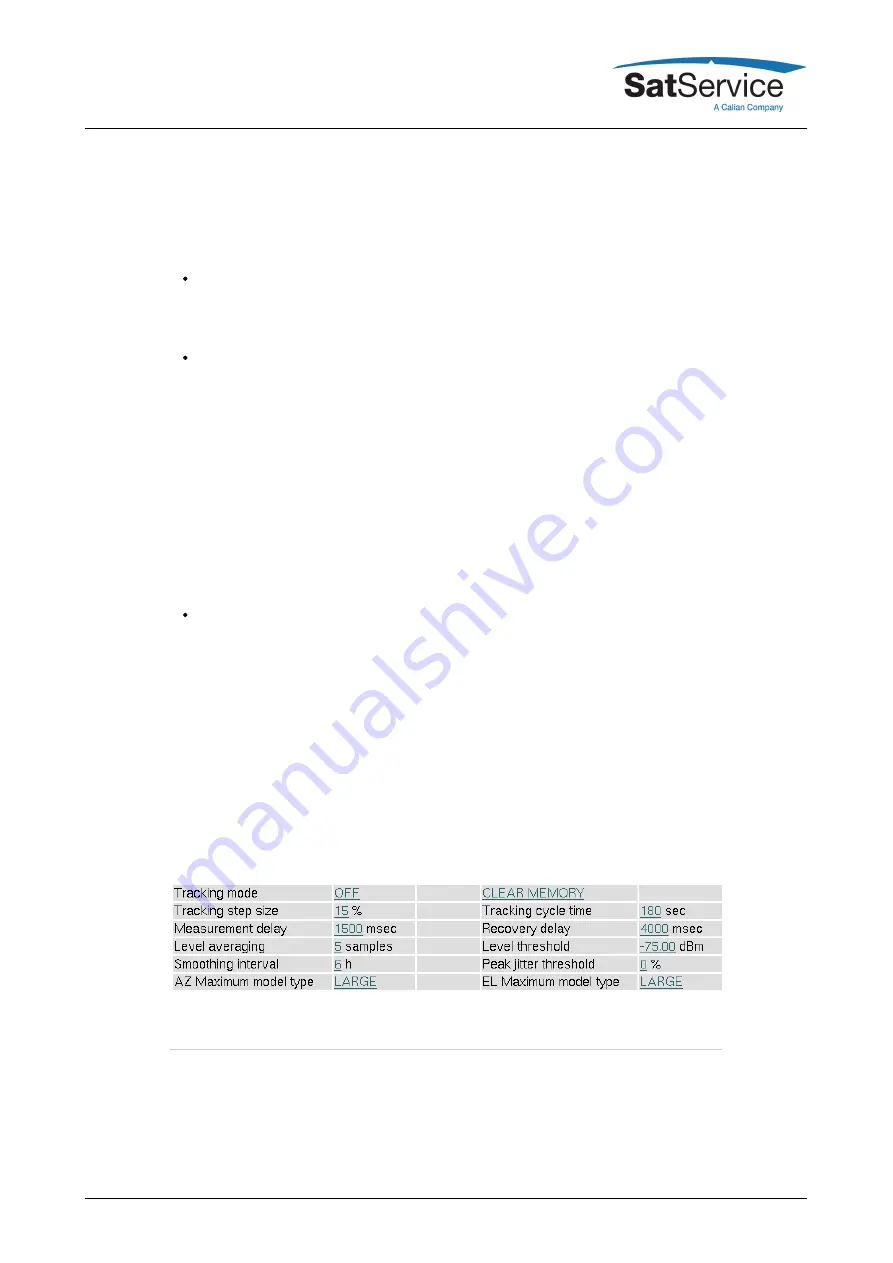
Tracking Parameters Page Example:
The page 'Test' displays the electrical / logical level of all inputs and outputs of the ACU. This
helps you to install the ACU or to identify a malfunction of peripheral components. Below some
information how to interpret the values in this page are given.
Electrical I/O Levels
(C) 2022, SatService GmbH
www.satnms.com
ACU-ODM-UM-2209 Page 32/73







































































