























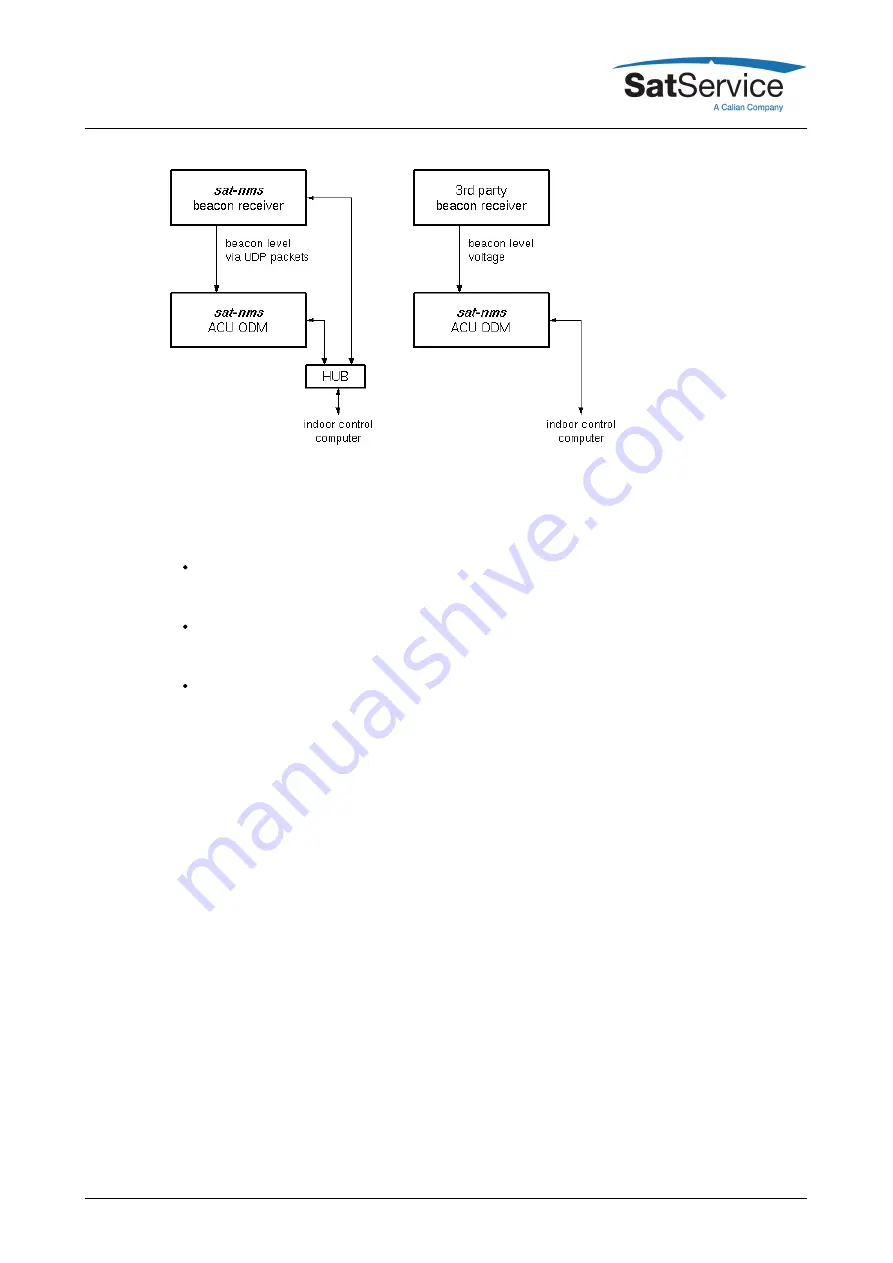
If a sat-nms LBRX beacon receiver is used with the ACU, it additionally gets connected to the
ACU through an Ethernet cable. Usually an Ethernet hub is used to connect the ACU, the LBRX
and the controlling computer. With a sat-nms LBRX beacon receiver some additional features are
available for the tracking:
The beacon receiver sends the actual level as UDP packets over the LAN. The ACU ODM
receives this value without any accuracy degrading due to cascaded digital to analog /
analog to digital conversions.
The ACU reads the beacon frequency from the LBRX at the start of each tracking cycle. The
value read from the receiver overwrites the value set by the operator and is used to
calculate the antenna's beamwidth.
The ACU informs the sat-nms LBRX when a tracking cycle starts and when it ends. The
LBRX suspends any background activities like noise reference measurements or frequency
tracking. This ensures, that the beacon receiver recognizes level differences without a delay
during the tracking cycle.
For a well functioning step track with a third party receiver, it is important to adjust the voltage
level range to the scale and offset provided by the beacon receiver. If at the beacon receiver
these values may be adjusted too, a preferable scale is 0.5V/dB for 20dB usable range. The
offset should be adjusted, that the receive level at clear sky conditions leave a headroom of 3dB
at the top end of the range. The analog voltage never should reach the physical limit of 0V/10V
under normal conditions. Clamping the level voltage probably will misslead the tracking.
The peak positions found by the step track may jitter due to noise. Specially, if an almost stable
positioned satellite is tracked with a relatively small antenna, this jitter may be more than the real
movement of the satellite. To stabilize the tracking in such situations, the sat-nms ACU provides a
smoothing function which lets you reduce the pointing jitter.
The smoothing function is based in the fact, that most satellites (specially that ones which are on
a stable orbit position) require the antenna to follow a small amplitude sine function with 24 hours
cycle time in order to track the satellite optimally.
If you activate smoothing by setting the smoothing time to a non zero value, all peak positions of
the last n hours get averaged by a sine function which matches the measured peaks at the best.
After each step track cycle the antenna gets moved to the 'smoothed' position rather than to the
(C) 2022, SatService GmbH
www.satnms.com
ACU-ODM-UM-2209 Page 64/73







































































