


























Section 1 - Introduction
12
MLGPS-P
User's Guide
Differential GPS is a system in which a
Base Station
on a stable, known point acts as a reference for the
Rover
(the GPS receiver attached to the monitored structure). The Base Station calculates the difference between its
known location and its reported position ‒ which is inaccurate due to atmospheric errors ‒ and determines the
known error. Then, that error is transmitted to the Rover so that the Rover's reported position can be corrected
for the known error. For this to work, the distance between the Rover and Base Station (known as the
baseline
)
must be short enough that the Rover and Base Station experience the same atmospheric conditions.
If set up correctly, Differential GPS can greatly reduce or nearly eliminate atmospheric related errors and other
sources of noise, and can result in sub-centimeter accuracy.
(Figure 1.3 B ‒ A diagram of Differential GPS)
Differential GPS relies on a stable point of reference. The addition of multiple Base Stations can help to ensure
that a stable point of reference is always available. Multiple baselines also allow Base Stations to monitor their
positions relative to one another, and if a Base Station is experiencing movement, that movement can be
observed and accounted for.
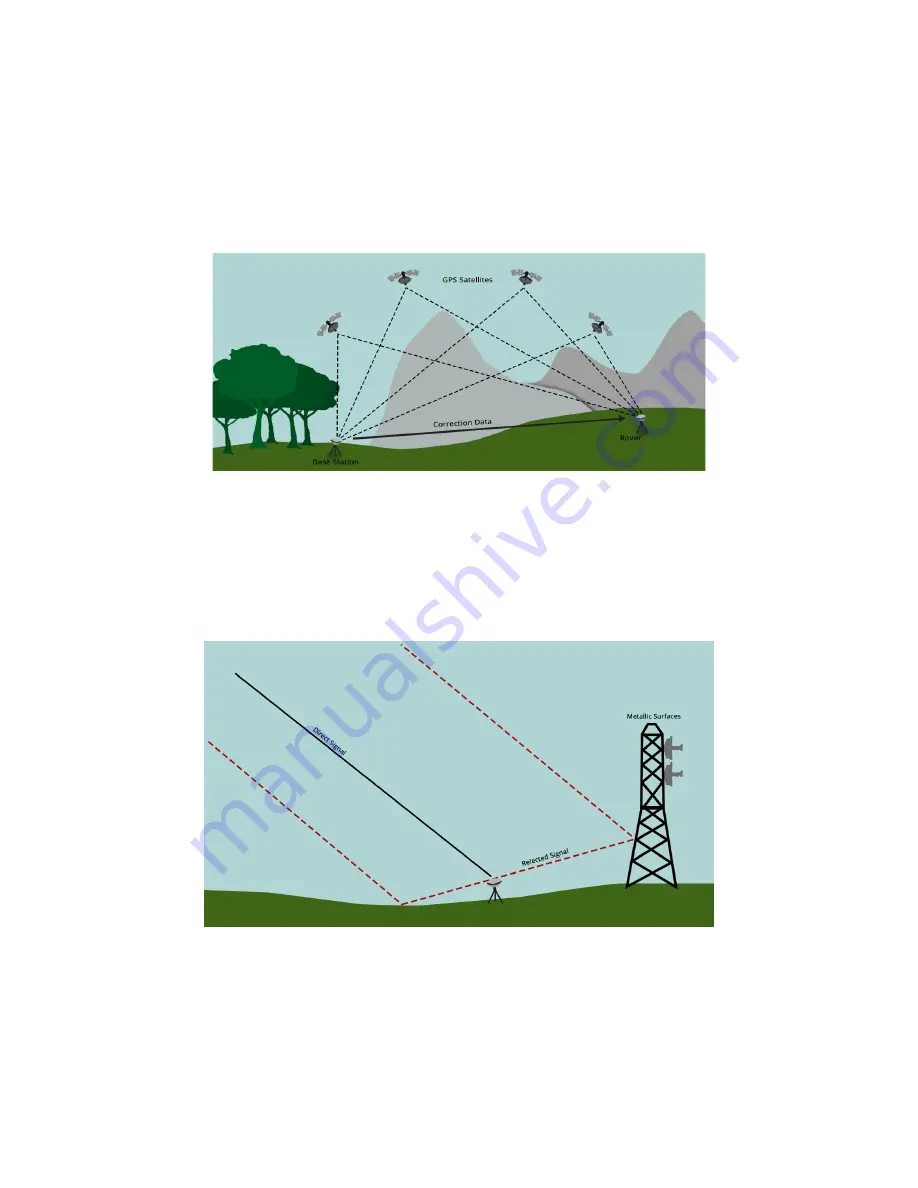
Multipath
is one of the dominant sources of error in Differential GPS. Multipath is the reception of signals from
the satellite that did not follow the direct line-of-sight, meaning they bounced off an object within the proximity
of the GPS receiver antenna but are interpreted as direct signals. This will reduce the accuracy of readings.
(Figure 1.3 C ‒ Multipath Error)
Multipath cannot be prevented by Differential GPS. To reduce multipath, proper antenna site placement is key.
The antenna should be placed in an environment where reflective surfaces are minimized. Keep in mind when
deciding on site placement that the antenna must still have line-of-sight with a satellite to receive signals from
that satellite, so unobstructed sky views are a priority.






































































