





























Section 4 - MultiLogger Configuration
MLGPS-P
User's Guide
61
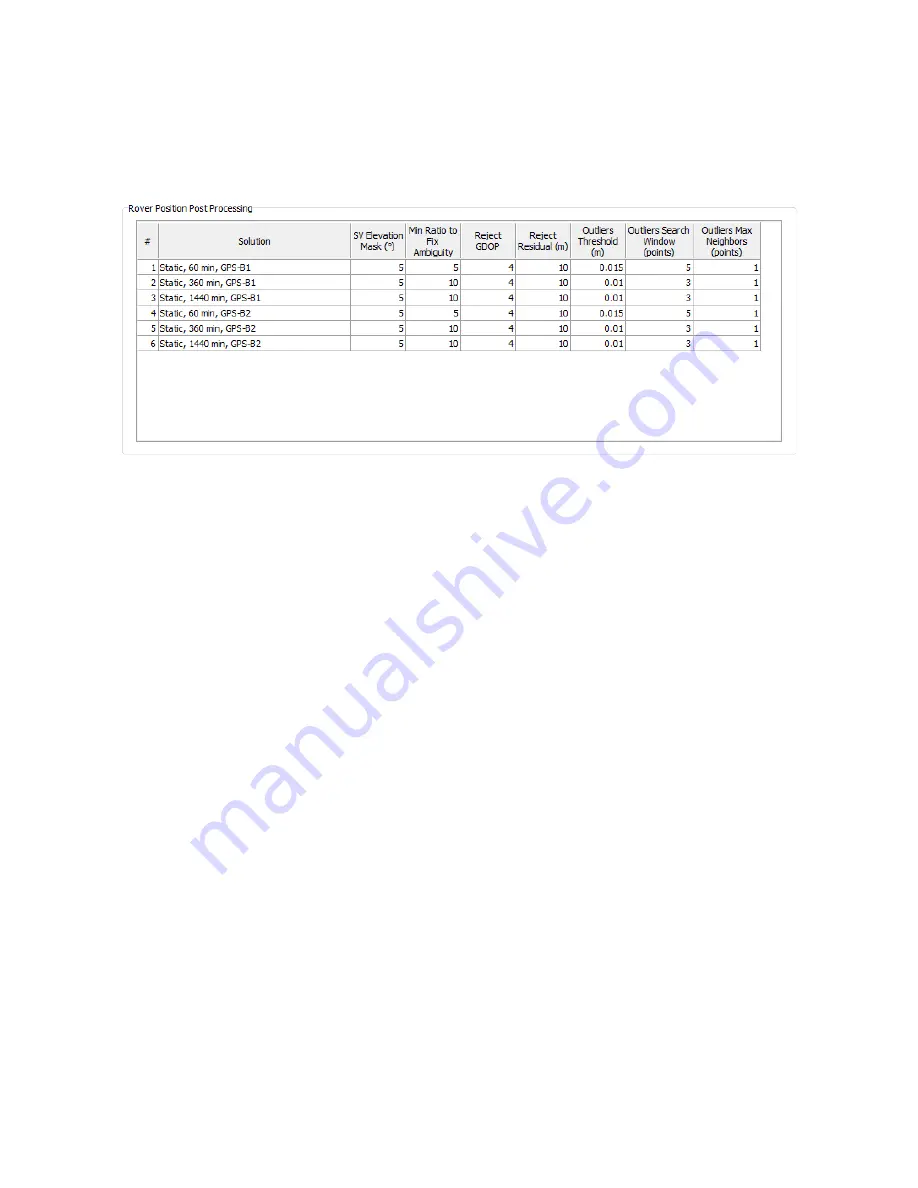
Rover Position Post Processing
The user can customize the settings for the post processing of each solution. Post processing settings are not
intended to be changed on a regular basis, as this may introduce offsets or shifts in the data. Settings are
applied automatically dependent on the processing interval selected. It is recommended to keep default
settings.
(Figure 4.4.3 F ‒ The Rover Position Post Processing options, where the solutions can be configured)
SV Elevation Mask (
) -
Allows the user to cut off satellites below a specified elevation above the horizon. Low
elevation satellites usually have weaker signals which may cause outliers in the solution. The default setting is
5
.
Min Ratio to Fix Ambiguity -
Integer ambiguity validation threshold for "ratio-test". It uses the ratio of squared
residuals of the best integer vector to the second-best vector.
Reject GDOP -
Reject threshold of GDOP (Geometric dilution of precision). If the GDOP is over the value, the
observable is excluded for the estimation process as an outlier.
Reject Residual (m) -
Reject threshold of innovation (pre-fit residual). If the innovation is over the value, the
observable is excluded for the estimation process as an outlier.
Outliers Threshold (m) -
Outliers Filter: Outlier is detected if deviation from average value is greater than the
threshold.
Outliers Search Window (points) -
Outliers Filter: Defines how many past points to use for calculating the
average position.
Outliers Max Neighbors (points) -
Outliers Filter: Defines how many consecutive outliers detection should be
made before considering all these detections as deformation.







































































