





















Glossary
MLGPS-P
User's Guide
91
Glossary
Almanac
‒ Broadcast by each satellite, Almanac data provides information on the state of the constellation, as
well as specific course/orbital parameters for each satellite within the constellation. This information helps
receivers predict the approximate location of nearby satellites, aiding their search for a signal. This information
is not highly precise, and is only valid for an unspecified period of time, generally several months. The less
current the Almanac is, the less accurate it is, resulting in longer signal search times.
Atmospheric Error/Delay
‒ The propagation of satellite signals through the atmosphere can result in
positioning errors in GNSS/GPS positioning for a variety of reasons that can be largely accounted for through
Differential GPS. See Ionospheric Delay and Tropospheric Error for more information.
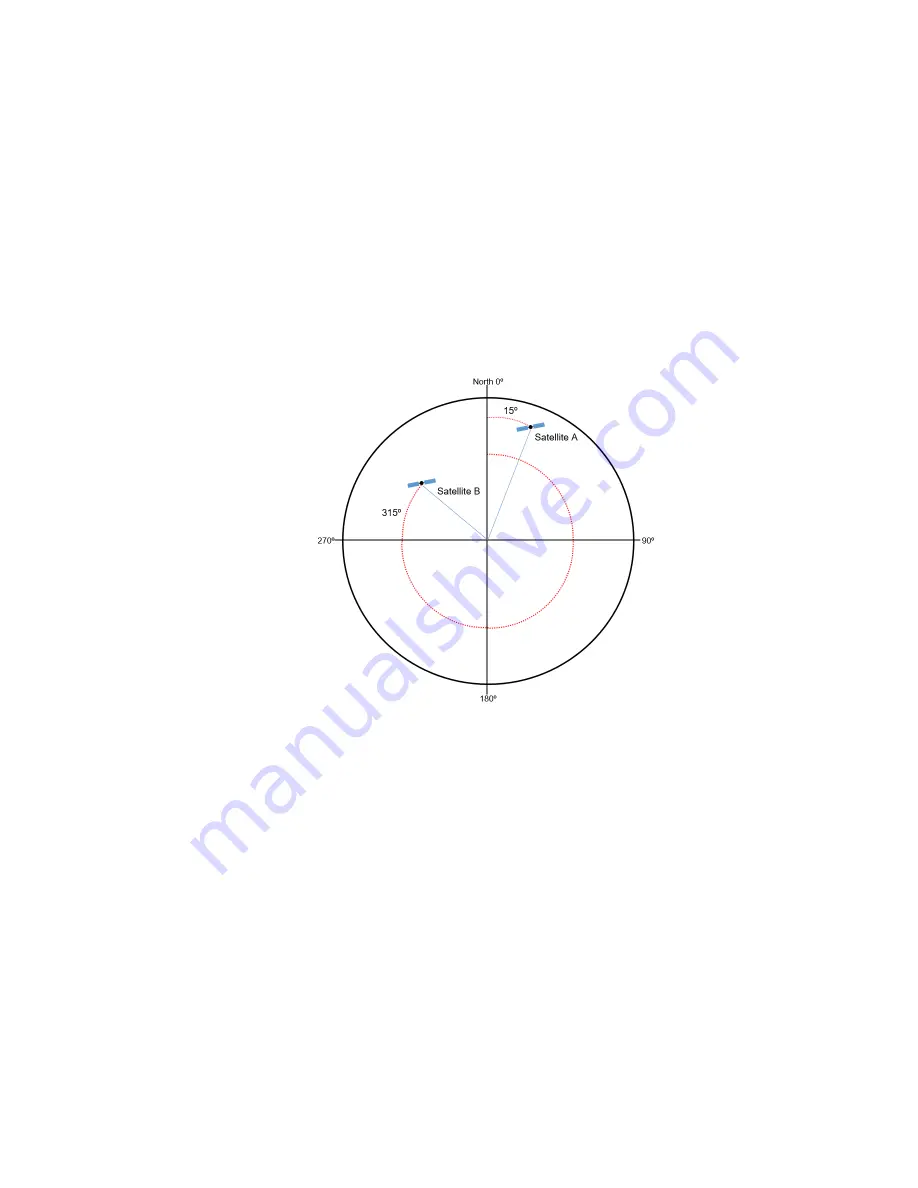
Azimuth
‒ The angle between the satellite and the North, at the receiver's location, in degrees and measured
clockwise around the receiver's local horizon. The diagram below provides an example. Satellite A is 15
degrees clockwise from North, so its azimuth is 15
. Satellite B is 315 degrees clockwise from North, or 45
degrees counter-clockwise from North, so its azimuth is 315
.
Baseline
‒ The distance or vector between a Base Station at a known location and a Rover at a to-be-
calculated position. This distance should be kept as small as possible, with a maximum distance of 10km, in
order to assure that the Base Station and the Rover station see the same atmospheric conditions. Larger
baselines mean that the stations are more likely to experience different atmospheric errors, reducing the
benefit of DGPS.
Base Station
‒ A GNSS receiver/station with known coordinates, typically located at a stable location, that
acts as a reference for the Rover stations whose exact coordinates are unknown and are being calculated. The
Base Station will calculate the difference, or error, between its known coordinates and its calculated/reported
coordinates. This difference is due in large part to errors caused by atmospheric conditions. This difference can
then be offset for in the calculation of the coordinates of the Rovers, allowing for more accurate positioning that
accounts for atmospheric errors. For this system to work accurately, the Baseline must be small enough that
the Base Station and Rover stations see the same atmospheric conditions. If the Baseline is large, typically
beyond 10km, the stations will not be seeing the same atmospheric conditions and the error in positioning that
the Base Station calculates will not as accurately apply to the Rovers.
Baud Rate
‒ The rate at which a signal carrying information is transferred in a communications channel, in bits
per second.





































































