


























COPYRIGHT © 1999 CANON INC.
CANON DADF-B1 REV.0 APR. 1999 PRINTED IN JAPAN (IMPRIME AU JAPON)
2-29
CHAPTER 2 BASIC OPERATION
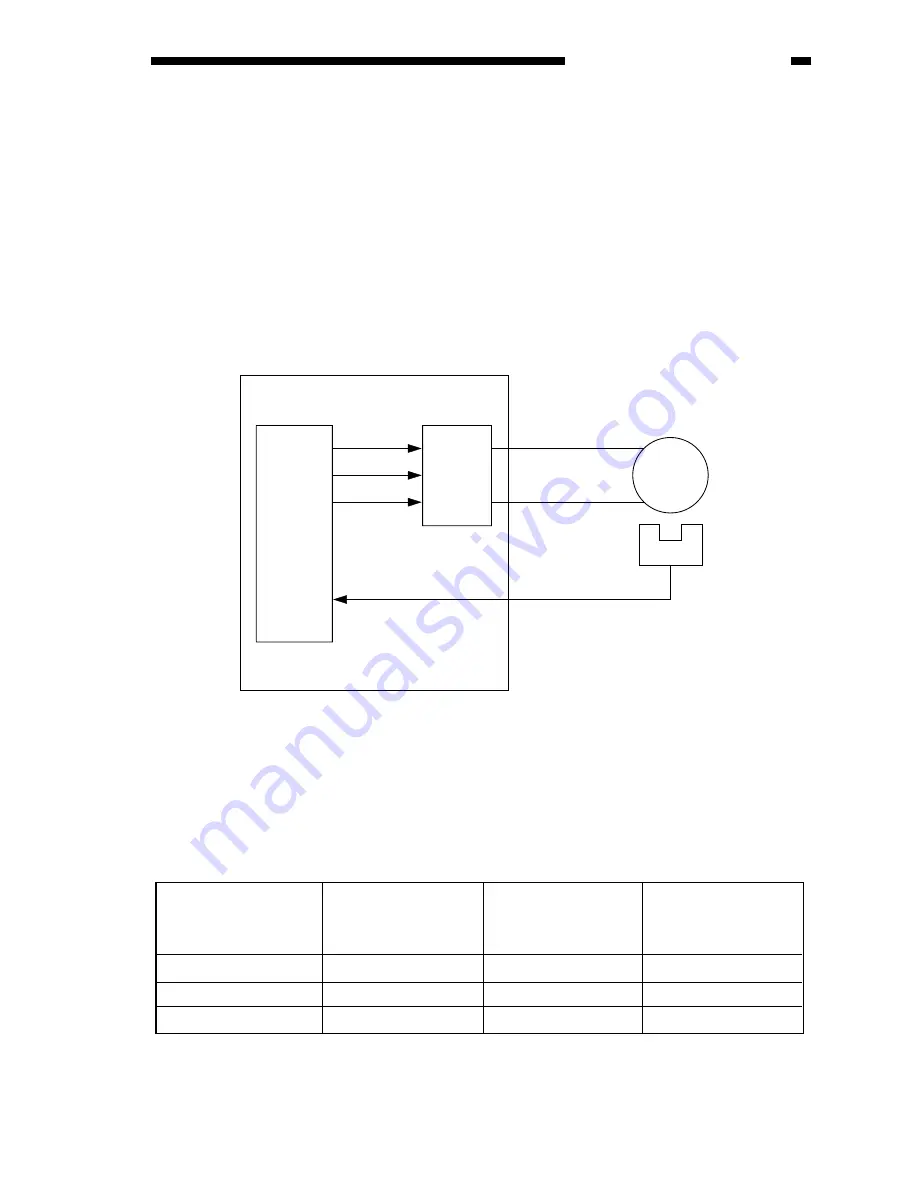
3. Controlling the Reversal Delivery Motor (M3)
Figure 2-243 is a diagram of the control circuit used for the reversal delivery motor (M3).
The reversal delivery motor is a DC motor. The CPU (Q1) on the ADF controller PCB sends the
reversal delivery motor rotation speed control signal (EMPWM) and the reversal delivery motor
rotation direction signal (EMFWD, EMREV) to the drive circuit, which in response drives the
reversal delivery motor.
When the reversal delivery motor (M3) rotates, the reversal delivery motor clock sensor (SR7)
turns on to send the reversal delivery motor clock signal (EMCK) to the CPU (Q1).
The CPU (Q1) compares the rotation speed selected in advance and the reversal delivery motor
clock signal (FMCK), and varies the reversal delivery motor rotation speed control signal (EMPWM)
to suit the selected speed.
The relationship between the reversal delivery motor rotation speed control signal (EMPWM),
reversal motor rotation direction signal (EMFWD, EMREV), and reversal delivery motor is as
follows:
Q1
SR7
CPU
M3
EMPWM
J9F-1
J9F-2
EMFWD
EMREV
EMCK
Drive
circuit
ADF controller PCB
Reversal delivery
motor
Reversal delivery
motor clock sensor
Figure 2-244
Stops
Rotates CW
Rotates CCW
’0’
’1’
’0’
’0’
’0’
’1’
’0’
’1’
’1’
Reversal delivery motor
rotation speed control
signal (EMPWM)
Reversal delivery motor
rotation speed signal
(EMFWD)
Reversal delivery motor
rotation direction signal
(EMREV)
Reversal delivery motor
operation
Table 2-206




























































