39
Scelta della zona di volo
8
Quando è pronto per il primo volo, dovrebbe scegliere un ambiente chiu-
so, possibilmente spazioso, dove non ci sono persone od ostacoli. Gra-
zie alle dimensioni e alla manovrabilità del Quadrocopter, i piloti esperti
sono in grado di farlo volare anche in ambienti chiusi relativamente
piccoli. Per i primi voli consigliamo assolutamente ambienti delle dimen-
sioni minime di 5 x 5 metri di superficie di base e 2,40 metri di altezza.
Dopo aver fatto il trim del Quadrocopter e preso confidenza con il suo
comando e le sue prestazioni, può provare a volare anche in ambienti
più piccoli e meno sgombri.
Solo per l’uso domestico (casa e giardino).
Tra controller ed Quadrocopter
non devono trovarsi oggetti come p.es. colonne o persone.
Check-list per la preparazione del volo
Questa check-list non sostituisce il contenuto di queste istruzioni per l’uso. Anche se
possono essere usate come Quick-Start-Guide, prima di proseguire raccomandia-
mo vivamente di leggere queste istruzioni per l’uso.
• Controllare il contenuto della confezione.
• Caricare l’accumulatore LiPo come descritto nel capitolo “Carica dell’accumulatore
LiPo”.
• Inserire nel Controller 2 batterie AA facendo attenzione che la polarità sia corretta.
• Cercare un ambiente adatto per il volo.
• Inserire l’accumulatore nell’apposito alloggiamento sul lato inferiore del Quadro-
copter, come descritto in
2b
.
• Collegare la batteria nel modellino.
•
AVVERTENZA! Immediatamente dopo l’accensione, mettere il Quadrocopter
su una superficie piana orizzontale. Il sistema giroscopico si allinea auto-
maticamente.
• I LED sul Quadrocopter lampeggiano.
• Accendere il Controller sull’interruttore ON/OFF.
Controllare assolutamente il commutatore Beginner-Advanced (
13c
).
Spin-
gere il joystick sinistro, cioè la leva dell’acceleratore, completamente verso l’alto e
poi di nuovo verso il basso.
• Lasciare al Quadrocopter un po’ di tempo finché il sistema è inizializzato corretta-
mente ed è pronto per l’uso. I LED sul Quadrocopter ora lampeggiano permanen-
temente. Il LED sul Controller ora è illuminato permanentemente.
• Ora ripetere evtlm. i suddetti punti, se si desidera fare volare contemporaneamente
altri Quadrocopter.
•
Avvertenza! Prima di ogni volo eseguire assolutamente la stabilizzazione
automatica
17
!
• Premere il pulsante “Start Rotors”.
• Controllare il dispositivo di comando.
• Familiarizzare con il dispositivo di comando.
• Stabilizzare eventualmente il Quadrocopter come descritto sotto
17
18 19 20
in modo che nel volo stazionario non si sposti senza co-
mandi da parte del Controller.
• Ora il Quadrocopter è pronto per l’uso.
• Se il Quadrocopter non mostra funzioni, ripetere il suddetto processo di collegamento.
• Far volare il modellino.
• Fare atterrare il modellino.
•
Staccare il collegamento a spina della batteria.
• Spegnere sempre il telecomando per ultimo.
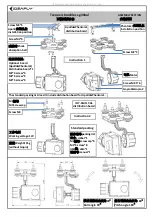
Volo del Quadrocopter a 4 canali
NOTA!
Soprattutto nei primi tentativi di volo azionare le leve sul Controller con estre-
ma precauzione e non troppo bruscamente. Bastano quasi sempre piccolissi-
mi movimenti sulla relativa leva per eseguire il rispettivo comando!
Se si dovesse notare che il Quadrocopter si sposta in avanti o lateralmente senza
l’azionamento della relativa leva, stabilizzarlo come descritto in (
17
18 19 20
) .
9
+/- gas (su/giù)
Per decollare o volare più in alto, spingere con precauzione in avanti la leva
dell’acceleratore sinistra. Per atterrare e volare più in basso, spingere con
precauzione indietro la leva dell’acceleratore sinistra.
10
Per far girare il Quadrocopter sul suo stesso asse verso sinistra o destra,
spostare con precauzione la leva sinistra a sinistra o a destra.
11
Per far volare il Quadrocopter verso sinistra o destra, spostare con precauzio-
ne la leva destra a sinistra o a destra.
12
Per far volare il Quadrocopter in avanti o indietro, spostare con precauzione la
leva destra in avanti o indietro.
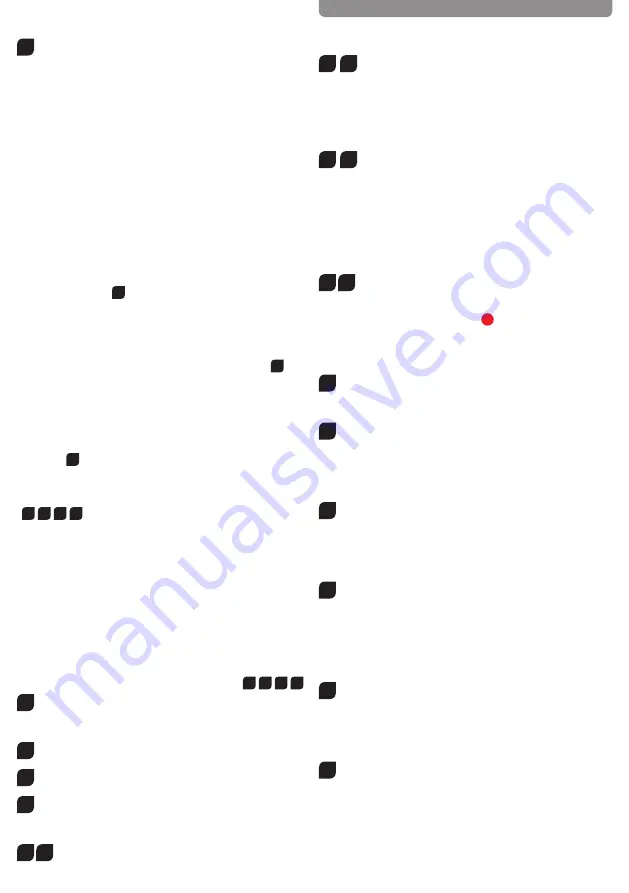
Avvio rotori e motori
13
a
Premere il pulsante “Start Rotors” sul controller per avviare i motori. Non
appena i rotori sono in funzione si può sollevare l’apparecchio spingendo
la leva di accelerazione verso l’alto.
Funzione looping
AVVERTENZA! SOLO PER PILOTI ESPERTI!
13
b
Se si preme il “Looping Button”, risuona 5 volte un segnale acustico.
Finché risuona il segnale acustico, muovere il joystick destro verso l’al-
to, il basso, a destra o sinistra. Il Quadrocopter esegue poi il looping o il roll-o-
ver nella relativa direzione. Assicurarsi che nel locale ci sia sufficiente spazio
su tutti i lati (ca. 2,5m).
Commutatore Beginner/Advanced
AVVERTENZA! 100% SOLO PER PILOTI ESPERTI!
13
c
30% = Modalità principianti
Il segnale acustico risuona una volta all’atto della commutazione.
60% = Modalità media
Il Quadrocopter reagisce con maggior sensibilità rispetto alla modalità 30%. Il
segnale acustico risuona due volte all’atto della commutazione.
100% = Modalità Advanced -> Modo 3D
Il Quadrocopter reagisce con molta sensibilità ai comandi. Il segnale acustico
risuona tre volte all’atto di commutazione.
Headless Mode
13
d
L’Headless Mode aiuta i principianti a imparare a volare. Non importa in
quale direzione il Quadrocopter si giri, la direzione di volo corrisponde
sempre a quella eseguita sul Controller. Un principiante non deve quindi più
pilotare al contrario, quando p.es. dirige il velivolo verso sé stesso.
Se si preme l’”Headless-Mode-Buttom”
10
, risuona un segnale acustico fin-
ché ci si trova nell’Headless Mode. Per disattivare l’Headless-Mode, premere
nuovamente il pulsante.
Controllo automatico dell’altezza
14
Non appena si rilascia il joystick sinistro in volo, il Quadrocopter mantiene
automaticamente l’altezza di volo attuale.
Auto Landing
15
È possibile attivare in qualsiasi momento la funzione di atterraggio automatico
premendo il pulsante “Auto Landing”. In questo caso, il numero di giri dei roto-
ri diminuisce gradualmente. Durante la fase di atterraggio, è sempre possibile
modificarne la posizione muovendo il joystick destro. Non appena il Quadro-
copter è a terra, i motori si spengono.
Auto-Start & Fly to 1.5m
16
Premere il pulsante “Auto-Start & Fly to 1.5m” sul controller per avviare i mo-
tori e volare in modalità automatica a 1,5 m d’altezza. Durante la fase di avvio,
è sempre possibile modificare la direzione di volo muovendo il joystick destro.
Non appena il Quadrocopter raggiunge l’altezza di ca. 1,5 m mantiene l’altez-
za in modo automatico.
Stabilizzazione del Quadrocopter
17
Stabilizzazione automatica
1. Mettere il Quadrocopter su una superficie orizzontale.
2. Collegare il Quadrocopter con il Controller come descritto in
“Collegamento del modellino con il Controller”.
3. Spingere contemporaneamente la leva dell’acceleratore e quella per
Avanti/Indietro nell’angolo inferiore destro. Il LED sul Quadrocopter
lampeggia brevemente e poi si illumina permanentemente. Il segnale
acustico risuona 1 volta.
4. Se habrá completrado el ajuste neutro.
18
Se nel volo stazionario il Quadrocopter si sposta verso sinistra o destra senza
azionamento della leva per l’inclinazione verso sinistra o destra, procedere
come segue:
Se il Quadrocopter si sposta autonomamente di lato in modo veloce o lento,
premere gradualmente verso destra il trimmer inferiore destro per l’inclina-
zione a destra/sinistra. Se il Quadrocopter si sposta verso destra, premere
gradualmente verso sinistra il trimmer per l’inclinazione a destra/sinistra.
19
Se nel volo stazionario il Quadrocopter si sposta in avanti o indietro senza
azionamento della leva per il movimento in avanti/indietro, procedere come
segue:
Se il Quadrocopter si sposta autonomamente in avanti in modo veloce o lento,
premere gradualmente verso il basso il trimmer superiore destro per il mo-
vimento in avanti/indietro. Se il Quadrocopter si sposta all’indietro spingere
gradualmente verso l’alto il trimmer per il movimento in avanti/indietro.
ITALIANO