




























Chapter 5 Functional Parameter Simple List 200 Series General Purpose Vector AC Drive
50
percentage
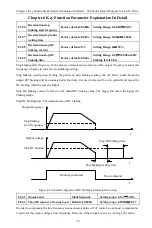
When the feedback pressure is lower than
(pressure setting value * F7-11), the wake-up
timer is performed. if the wake-up timer
exceeds the wake-up delay time of F7-12, the
ac drive exits the dormant state.
F7-12 Wakeup
delay
0.0
~
600.0s
2.0s
√
F7-13
PID feedback
overpressure detection
value
0.0
~
100.0%
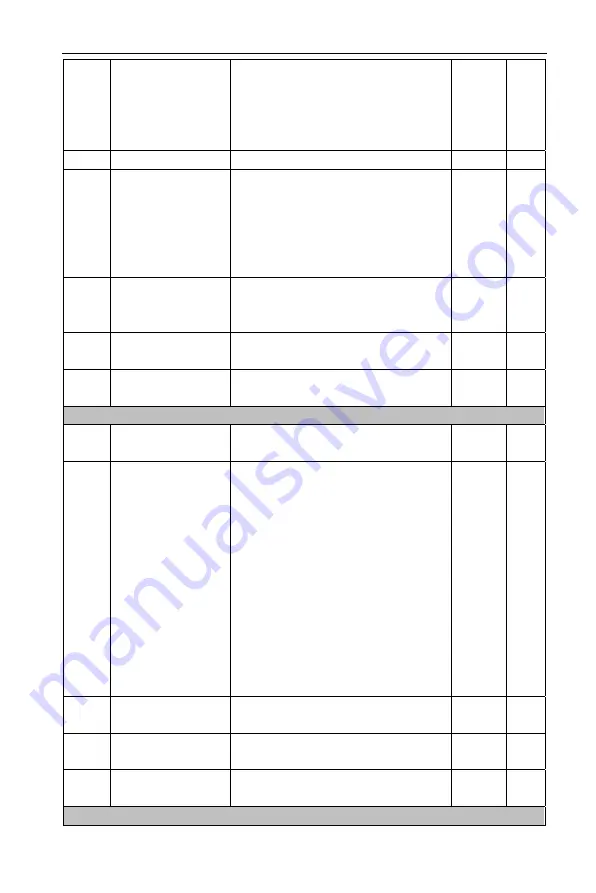
When the feedback value is bigger than the PID
feedback excessive detection value F7-13, the
system starts to detect timing. If the timing time
exceeds F7-14, the ac drive selects to run
according to F7-01.
100.0%
√
F7-14
PID feedback
overpressure detection
time
0.0
~
600.0s
2.0s
√
F7-15
PID feedback
overpressure fixed output
0.0
~
100.0% Maximum frequency
50.0%
√
F7-16
PID maximum output
frequency
0.0
~
100.0% Maximum frequency(Output
frequency upper limit in PID mode running)
100.0%
√
Group F8: Communication Parameter Group
F8-00
Local communication
address
0: Broadcast address
1
~
247
1
√
F8-01
Communication
allocation
The unit: Communication baud
1: 2400BPS
2: 4800BPS
3: 9600BPS
4: 19200BPS
5: 38400BPS
Ten: Data parity setting
0: No parity (N, 8, 1)for RTU
1: Even parity (E, 8, 1)for RTU
2: Odd parity (0, 8, 1)for RTU
3: No parity(N, 8, 2)for RTU
4: Even parity(E, 8, 2)for RTU
5: Odd parity(O, 8, 2)for RTU
0003
√
F8-02
Communication
response delay
0.000s
~
1.000s
0.003s
√
F8-03
The fault time of
communication overtime
0.0s( Invalid)
0.001
~
30.000S
0.000s
√
F8-04
Communication response
setting
0: Respond for writing
1: No respond for writing
0000
√
Group F9: Human-computer Interface Parameter Group







































































