



























200 Series General Purpose Vector AC Drive Chapter 6 Key Functional Parameter Explanation In Detail
61
In order to obtain better vector control performance, motor parameter tuning is required.
0: No operation; The auto-learning is banned.
1: Asynchronous motor dynamic parameter auto-learning
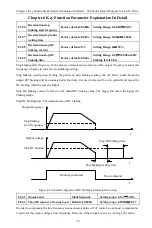
To ensure the dynamic control performance of the drive, please select complete tuning, at this time, the
motor and load being disconnected, reserve the motor no-load and confirm the motor in the standstill state.
During the complete tuning process, the drive performs static tuning firstly, and then accelerates to 90% of
the rated motor frequency according to the acceleration time F0-10. After maintaining for a period of time,
it decelerates and stops according to the deceleration time F0-11 and finishes the tuning.
Before the complete tuning of the asynchronous machine, it needs to set the motor nameplate parameters
F3-00
、
F3-01
、
F3-02
、
F0-16
、
F0-17.For the complete tuning of the asynchronous motor, the ac drive can
get F3-03
~
F3-07 five motor parameters.
Action instrument: Set the function code to 1, and then press the RUN key, the ac drive will perform
dynamic parameter auto-learning.
2: Asynchronous motor static parameter auto-learning
It is suitable for the occasions where the asynchronous motor and the load are not easy to disconnect and
cannot be fully tuned. Before the static tuning of the asynchronous motor, the motor nameplate parameters
F3-00, F3-01, F3-02, F0-16, F0-17 must be correctly set. For asynchronous motor static tuning, the ac
drive can obtain three parameters F3-03 ~ F3-05.
Action instrument: Set this function code as 2, then press RUN key, the ac drive starts the static tuning
auto-learning.
Function code
Name
Setting
Function description
F0-13
Terminal command mode
0
Two-wire 1
F4-00
S1 terminal function selection
1
Forward running(FWD)
F4-01
S2 terminal function selection
2
Reverse running(REV)
This parameter defines 5 different modes to control the running of AC Drive through external terminals.
Note: For the convenience of explanation, the following three terminals S1, S2, and S3 among the
multi-function input terminals of S1
~
S6 are arbitrarily selected as external terminals. That is, the
functions of the three terminals S1, S2, and S3 can be selected by setting the values of F4-00
~
F4-02.
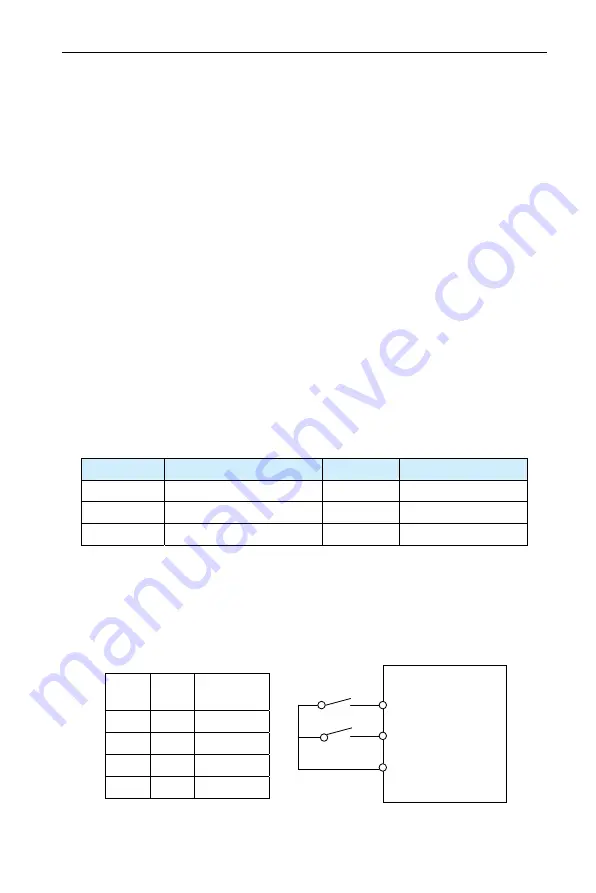
Terminal command mode 0: Two-wire mode 1. This mode is the most commonly used two-wire mode.
Terminals S1 and S2 determine the forward and reverse running of the motor. The function code is set as
follows:
K1
K2
S1 Forward RUN
(
FWD
)
S2 Reverse RUN
(
REV
)
COM Digital common
Figure 6-4 Two-wire mode 1
K1 K2
Running
command
1 0 Forward
0 1 Reverse
1 1 Stop
0 0 Stop







































































