






















200 Series General Purpose Vector AC Drive Chapter 6 Key Functional Parameter Explanation In Detail
67
frequency is less than FA-29, the deceleration time 1 is selected.
Fb-04
VF over current speed loss
protection point
Factory default: 180.0% Set range: 10.0%
~
210.0%
Fb-17 VF over current speed loss gain Factory default: 5
Set range: 0
~
200
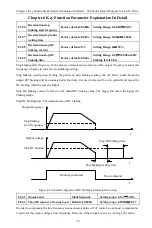
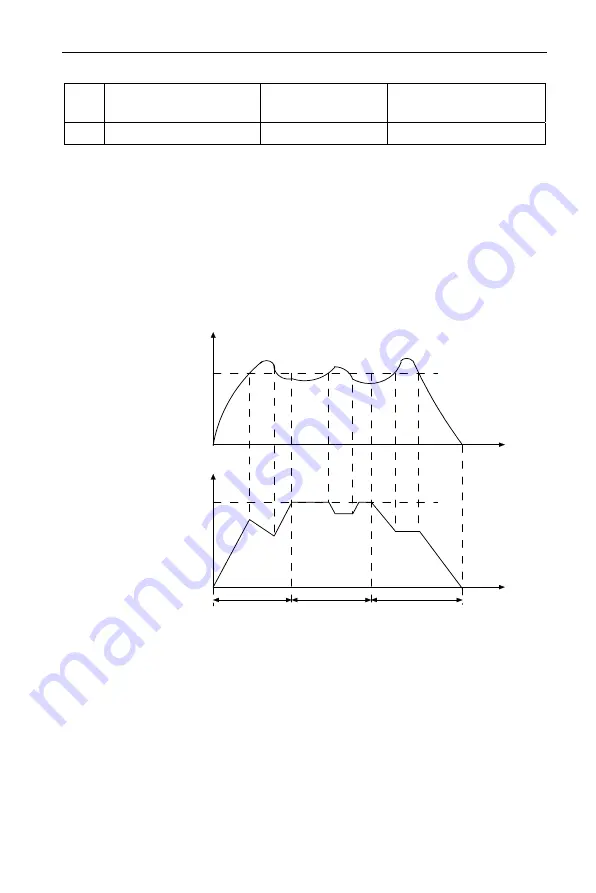
During the acceleration and deceleration of the drive, when the output current exceeds the over-current
stall protection current, the drive stops the acceleration and deceleration process and maintains the current
operating frequency, and then continues to accelerate and decelerate after the output current drops.
Over-current stall gain is used to adjust the ability of the drive to suppress over-current during acceleration
and deceleration. The larger the value, the stronger the ability to suppress over-current. Under the premise
of no overcurrent, the smaller the gain setting, the better. For the load with small inertia, the over-current
stall gain should be small, otherwise the dynamic response of the system will slow down. For loads with
large inertia, this value should be large, otherwise the suppression effect is not good, and overcurrent
faults may occur. When the over-current stall gain is set to 0, the over-current stall function is canceled.
Output current
Overcurrent stall
protective current
Output frequency Hz
Set frequency
Time t
Time t
Acceleration
process
Constantspeed
process
Deceleration
process
Figure 6-13 Schematic diagram of over current speed loss protection point







































































