

























iii
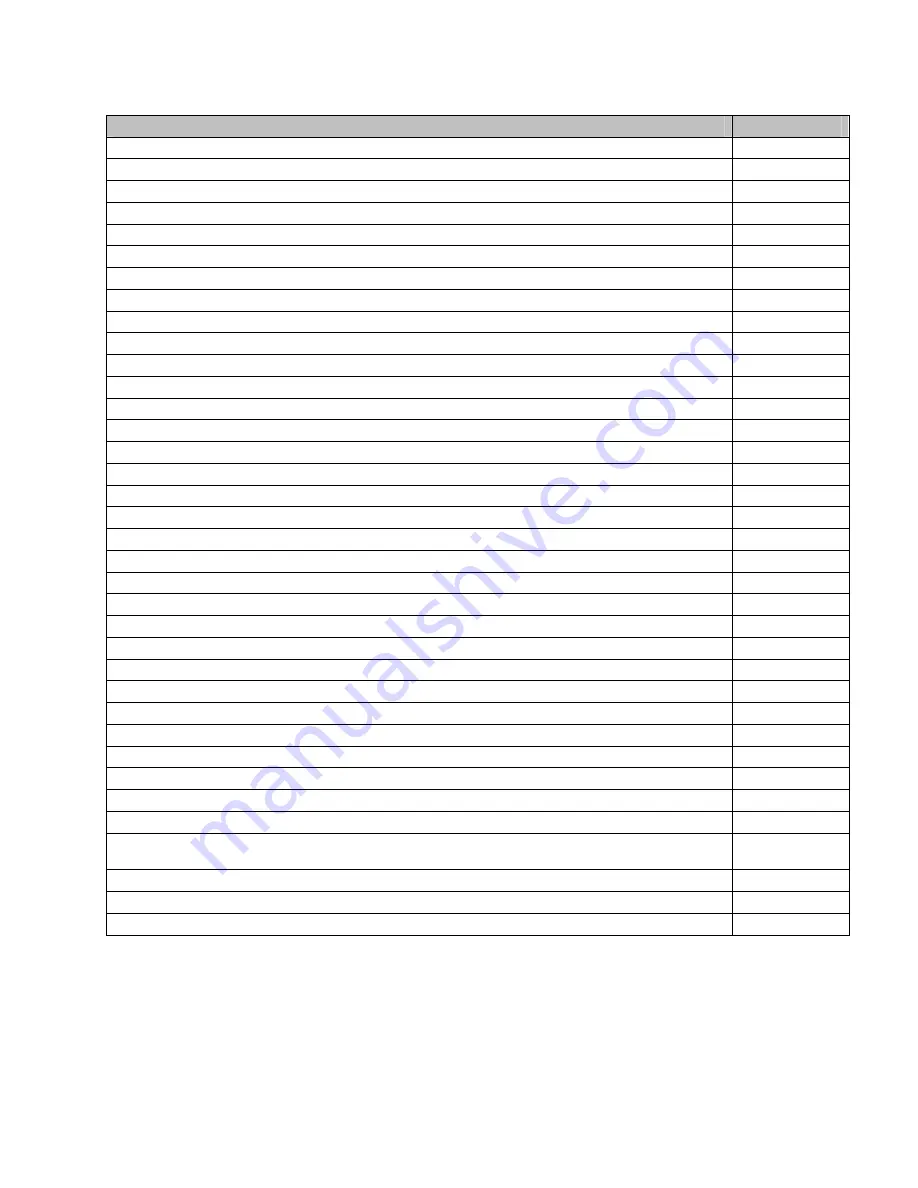
Application
Parameter Code
When you want to use the auto tuning function
FU2-41 ~ 44
When you want to operate using PID feedback
FU2-50 ~ 54
When you want to change the reference frequency for acceleration and deceleration
FU2-70
When you want to change the acceleration and deceleration time scale
FU2-71
When you want to set the initial keypad display that is displayed when the power is turned ON
FU2-72
When you want to set the user defined display
FU2-73
When you want to adjust the gain for the motor RPM display
FU2-74
When you want to set the dynamic braking (DB) resistor mode
FU2-75 ~ 76
When you want to verify the inverter software version
FU2-79
When you want to change the connection from one motor to the other motor which use difference parameters
FU2-81 ~ 90
When you want to copy the inverter parameter to another inverter
FU2-91 ~ 92
When you want to initialize the parameters
FU2-93
When you want to prevent the parameters from being changed
FU2-94
I/O Group
When you want to set the analog voltage or current for the frequency reference
I/O-01 ~ 10
When you want to set the operating method when the frequency reference is lost
I/O-11
When you want to change the functions for the input terminals P1, P2, and P3
I/O-12 ~ 14
When you want to check the status of the input/output terminals
I/O-15 ~ 16
When you want to change the response time of the input terminals
I/O-17
When you want to use the JOG and multi step speed operation
I/O-20 ~ 24
When you want to change the 1
st
~ 7
th
acceleration/deceleration time
I/O-25 ~ 38
When you want to use the FM meter terminal output
I/O-40 ~ 41
When you want to set the frequency detection level
I/O-42 ~ 43
When you want to change the functions of the multi function auxiliary contact output (AXA-AXC)
I/O-44
When you want to exchange the motor to commercial power line from inverter or the opposite
I/O-44
When you want to use the fault relay (30A, 30B, 30C) functions
I/O-45
When you want to use RS232/485 communication
I/O-46 ~ 47
When you want to set the operating method when the frequency reference is lost
I/O-48 ~ 49
When you want to use the auto (sequence) operation
I/O-50 ~ 84
EXT Group
(When a Sub-board and/or an option board is installed)
When you want to define the functions for the input terminals P4, P5, P6 (SUB-A, SUB-C)
EXT-02 ~ 04
When you want to use the analog voltage (V2) input (SUB-A, SUB-C)
EXT-05 ~ 10
When you want to use the encoder pulse for feedback to control the motor speed, or use the pulse input for
frequency reference (SUB-B)
EXT-14 ~ 24
When you want to change the functions of the output terminals Q1, Q2, Q3 (SUB-A, SUB-C)
EXT-30 ~ 32
When you want to use the LM meter terminal output (SUB-A, SUB-C)
EXT-34 ~ 35
When you want to use the analog outputs (AM1, AM2 terminals)
EXT-40 ~ 43
Summary of Contents for 30 HP30
Page 6: ......
Page 12: ......
Page 16: ...Chapter 1 Installation 1 4 BLANK ...
Page 18: ...Chapter 1 Installation 1 6 BLANK ...
Page 28: ...Chapter 1 Installation 1 16 Notes ...
Page 39: ...Chapter 2 Operation 2 11 Notes ...
Page 40: ......
Page 46: ......
Page 60: ...Chapter 4 Operation Examples 4 14 Notes ...
Page 83: ...Chapter 5 Parameter List 5 23 Notes ...
Page 84: ......
Page 92: ...Chapter 6 Parameter Description DRV 6 8 Notes ...
Page 105: ......
Page 106: ...Chapter 6 Parameter description FU1 6 14 Notes ...
Page 126: ...Chapter 6 Parameter Description FU2 6 34 Notes ...
Page 144: ...Chapter 6 Parameter Description I O 6 52 Notes ...
Page 162: ......
Page 188: ...Chapter 7 Options 7 26 Type 1 Max 400 Watt Type 2 Max 600 Watt A ...
Page 189: ...Chapter 7 Options 7 27 Type 3 ...
Page 194: ......
Page 204: ......
Page 210: ......







































































