

























E.DO GRIPPER TECHNICAL FEATURES
13
Comau Robotics Product Instruction
2.2.2
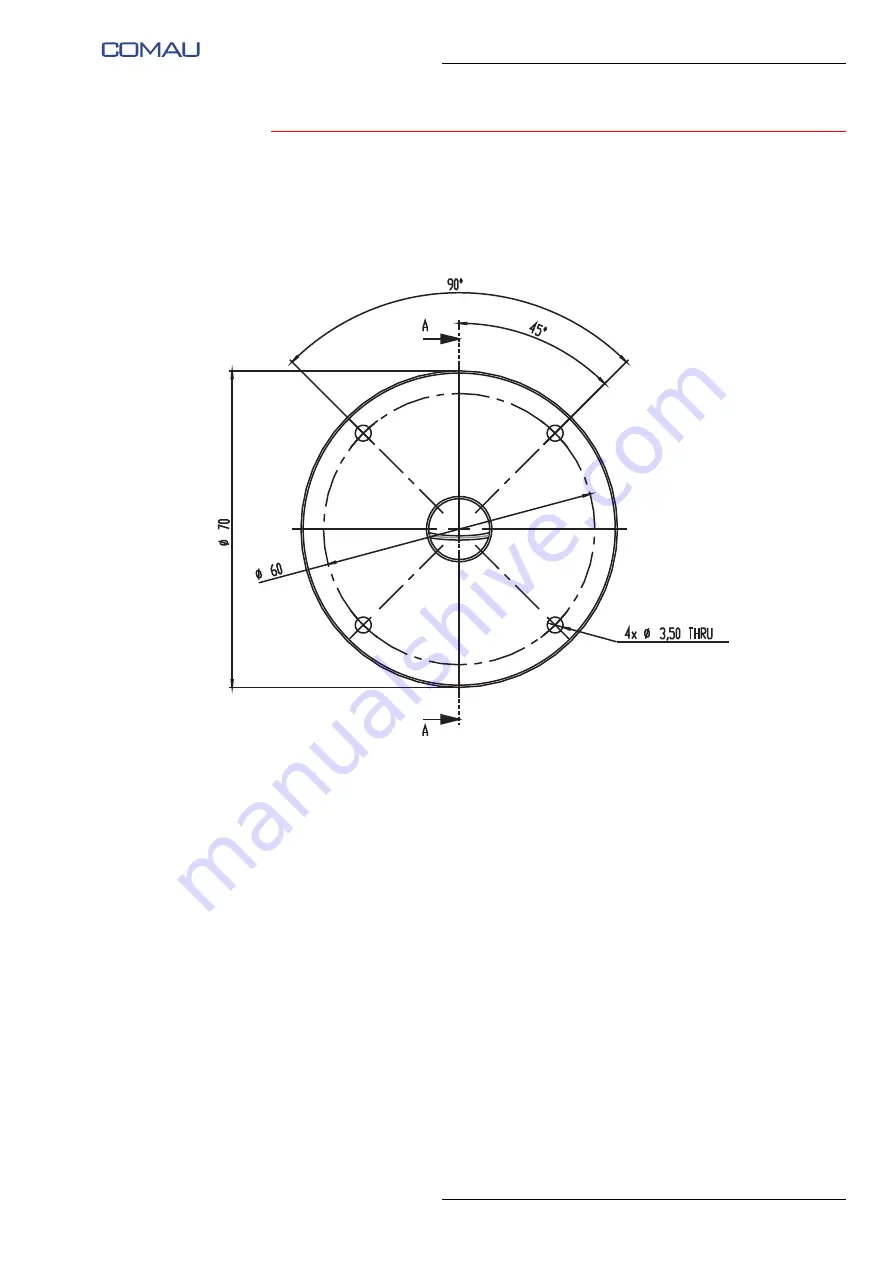
Flange hole diagram for e.DO Gripper fixing
The following drawing shows the diagram of holes present on the e.DO Gripper flange
to be used for the e.DO Gripper fixing to the e.DO Robot (dimensions in mm).
Fig. 2.3
- Flange hole diagram for e.DO Gripper
Summary of Contents for e.DO
Page 27: ......







































































