



























19
rotation is defined with the B commands. In „Cartesian Tool” mode the robot moves
aligned to the current tool coordinate system.
The override scales the motion speed between 0 and 100%.
Pic. 9: Buttons to jog the robot in cartesian mode. In joint mode the buttons change to the axis A1 to A4.
While jogging in cartesian mode virtual walls can be switched on to limit the motion
and thereby avoiding e.g. collisions. See section 7 for details.
When the virtual walls are active the robots blocks further motions and
generates warning sounds when leaving the allowed area. These
restrictions do not hold in joint mode.
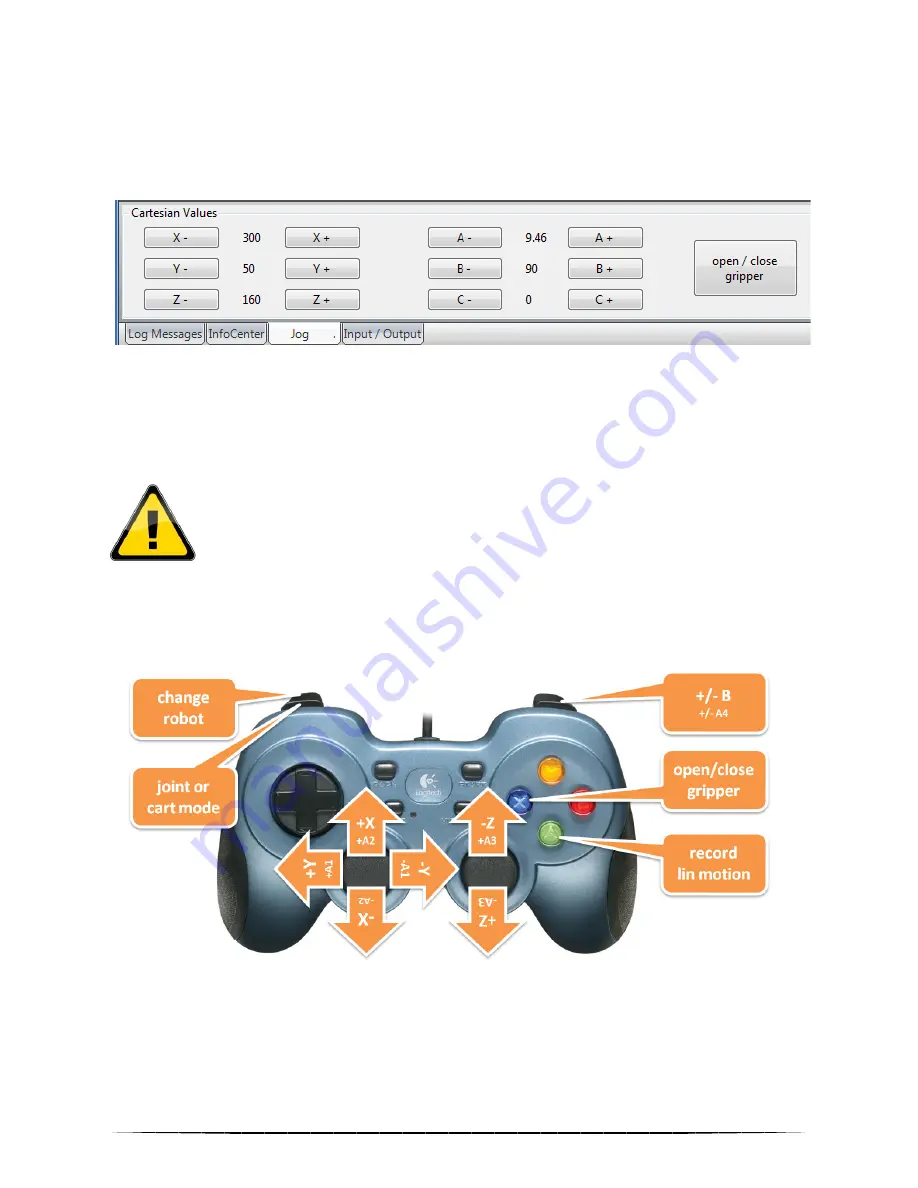
The most convenient way to move the robot is with a connected joypad, the picture
below shows the assignment of keys.
Pic. 10: Assignment of keys for the joypad. Upper markings for Cartesian mode, lower for joint mode.
Pressing X opens or closes the gripper, pressing A records a linear motion to the
current position and, if necessary, a gripper command.
Summary of Contents for Robot arm mower 4
Page 1: ...1 Bedienungsanleitung Mover4...
Page 2: ...2...






































































