





























C100E EtherCAT AC Servo Drive
www.coolmay.com
20
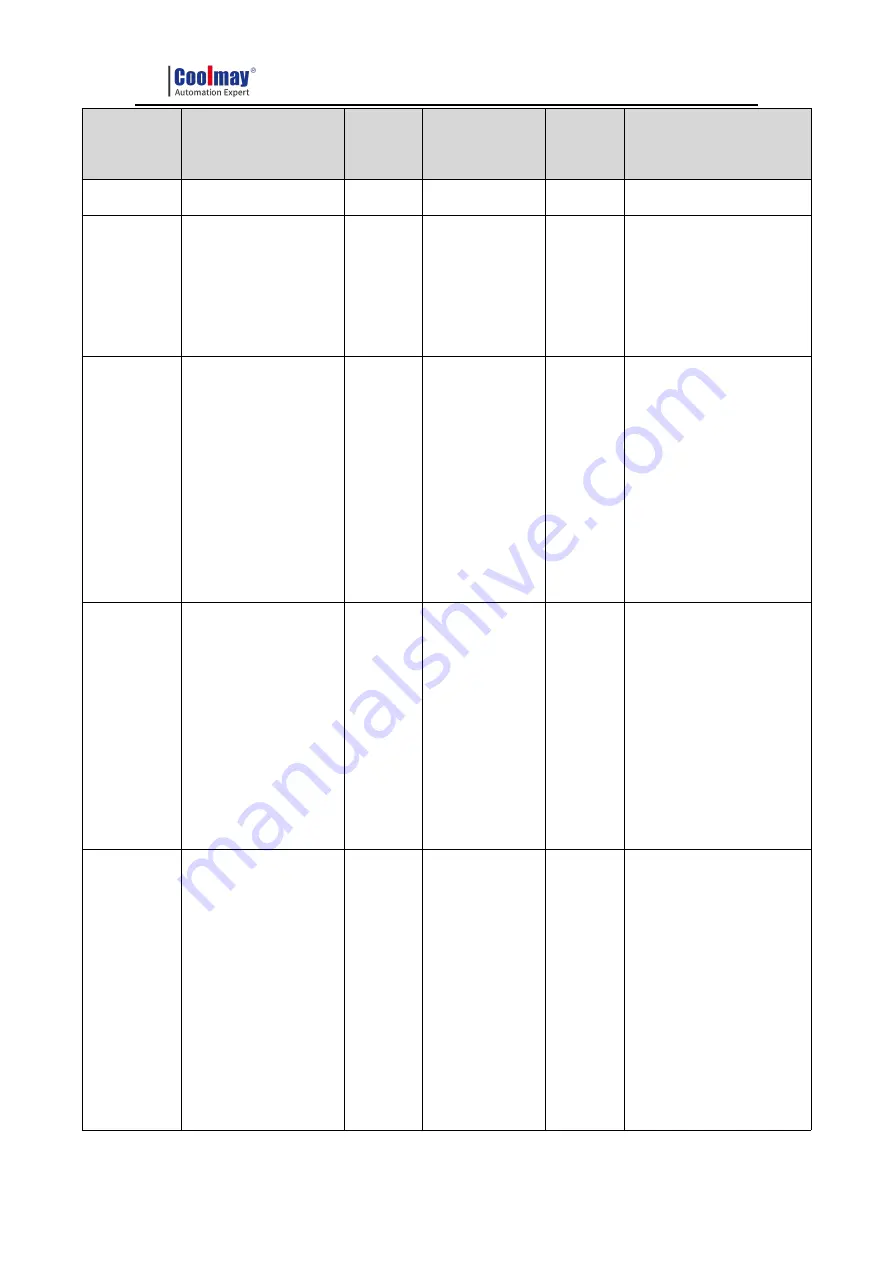
Address
Name
Read/
Write
Default
Value
Range
Introduction
of RPDO
1701h
RXPDO mapping
object258
R
0x60400010
0x607A0020
0x60B80010
0x60FE0120
1702h
RXPDO mapping
object259
R
0x60400010
0x607A0020
0x60FF0020
0x60710010
0x60600008
0x60B80010
0x607F0020
1703h
RXPDO mapping
object 260
R
0x60400010
0x607A0020
0x60FF0020
0x60600008
0x60B80010
0x60E00010
0x60E10010
1704h
RXPDO mapping
object261
R
0x60400010
0x607A0020
0x60FF0020
0x60710010
0x60600008
0x60B80010
0x607F0020
0x60E00010







































































