






















Use and Maintenance Manual – 08/2018 Rel. 4
Page 44
19.5 SWI wheel stop procedure on the positions of imbalance
Machines equipped with the electromagnetic clamping brake are capable of automatically stopping the wheel at the first imbalance
angular position that is reached during rotation. This allows the operator to have the wheel in position ready for the application of
the balancing weight thus increasing work and productivity speeds.
The procedure is referred to with the short English acronym SWI (Stop the Wheel on Imbalance). Within this manual, this acronym
will be used to refer to the wheel stop procedure on the positions of imbalance. The SWI procedure has three different operating
modes indicated in table T19.2.
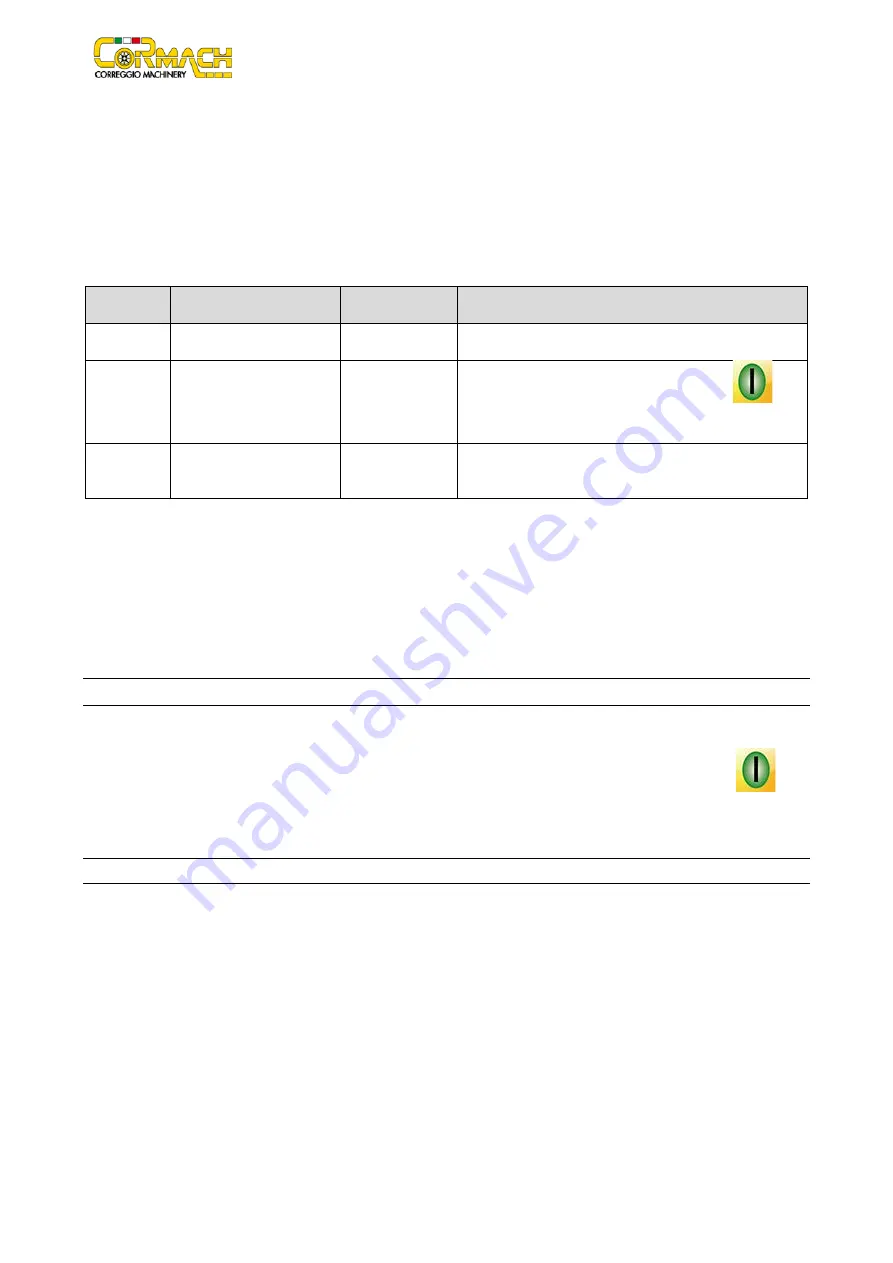
Table T19.2: Types of SWI procedures available
SWI mode
When it is or when it can
be run
Who can run the
SWI procedure
Notes
Automatic
At the end of every launch.
Machine
This is performed only if there is at least one imbalance value
on the wheel. Otherwise, conventional braking will occur.
Low speed
At the end of the launch,
when the wheel is
stationary and the wheel
guard is raised.
Operator
The procedure is started by pressing on icon
: the
wheel starts at low speed until it reaches the first imbalance
angular position.
Manual
At the end of the launch by
manually rotating the wheel
with wheel guard raised.
Operator
At each passage of the wheel in an angular position of
imbalance, the electromagnetic clamping brake will be
enabled for 30 seconds.
The three SWI modes have functions that are slightly different one from the other although, in all modes, the ultimate goal is to block
the wheel at an angular position of imbalance and make operator’s tasks quicker.
19.5.1 Automatic SWI procedure
During the automatic SWI procedure, the machine will measure rotational speed during braking at completion of the launch and,
when this reaches a predetermined value, it will release the brake allowing the wheel to spin freely by inertia. When the speed is low
enough, the machine will wait until the wheel passes through one of the angular positions of imbalance, therefore, it will enable the
electromagnetic clamping brake.
Note: for operator safety purposes, the SWI procedure will not be run when the MOTO Wheel Type is enabled.
19.5.2 SWI procedure at low speed
In the low speed SWI procedure, the wheel has already run the launch and is stationary. If the operator presses on icon
with
the wheel guard raised, the machine will apply slight acceleration to the wheel and then let it spin by inertia. When the speed is low
enough, the machine will wait until the wheel passes through one of the angular positions of imbalance, therefore, it will enable the
electromagnetic clamping brake.
Note: for operator safety purposes, the SWI procedure will not be run when the MOTO Wheel Type is enabled.
19.5.3 Manual SWI procedure
In this mode, the SWI procedure is activated by manual rotation of the wheel if the wheel guard is raised. When the wheel passes
through an angular position of imbalance, the machine will enable the electromagnetic clamping brake.
Angular positioning accuracy depends on many factors. The main ones being: wheel dimensions and weight, electromagnetic brake
adjustment, temperature, belt tension. In all cases, consider the following:
•
If the electromagnetic clamping brake is disabled, the SWI procedure will not be run in any of three modes;
•
If rotation speed decreases abruptly due to wheel inertia during the automatic SWI procedure or the low speed SWI (e.g.
due to excessive friction with rotating mechanical parts) the machine applies a little extra acceleration to the wheel itself
in order to reach the first angular position of imbalance. If, despite this, the wheel does not reach this position, the SWI
procedure is aborted after 5 seconds and the machine displays the error code
ERR 042
;
•
When using the manual SWI procedure, precision also depends on the speed that the operator turns the wheel at:
excessively high or low speeds reduce precision.
























































