





























Vector Sensor Reference Manual
43
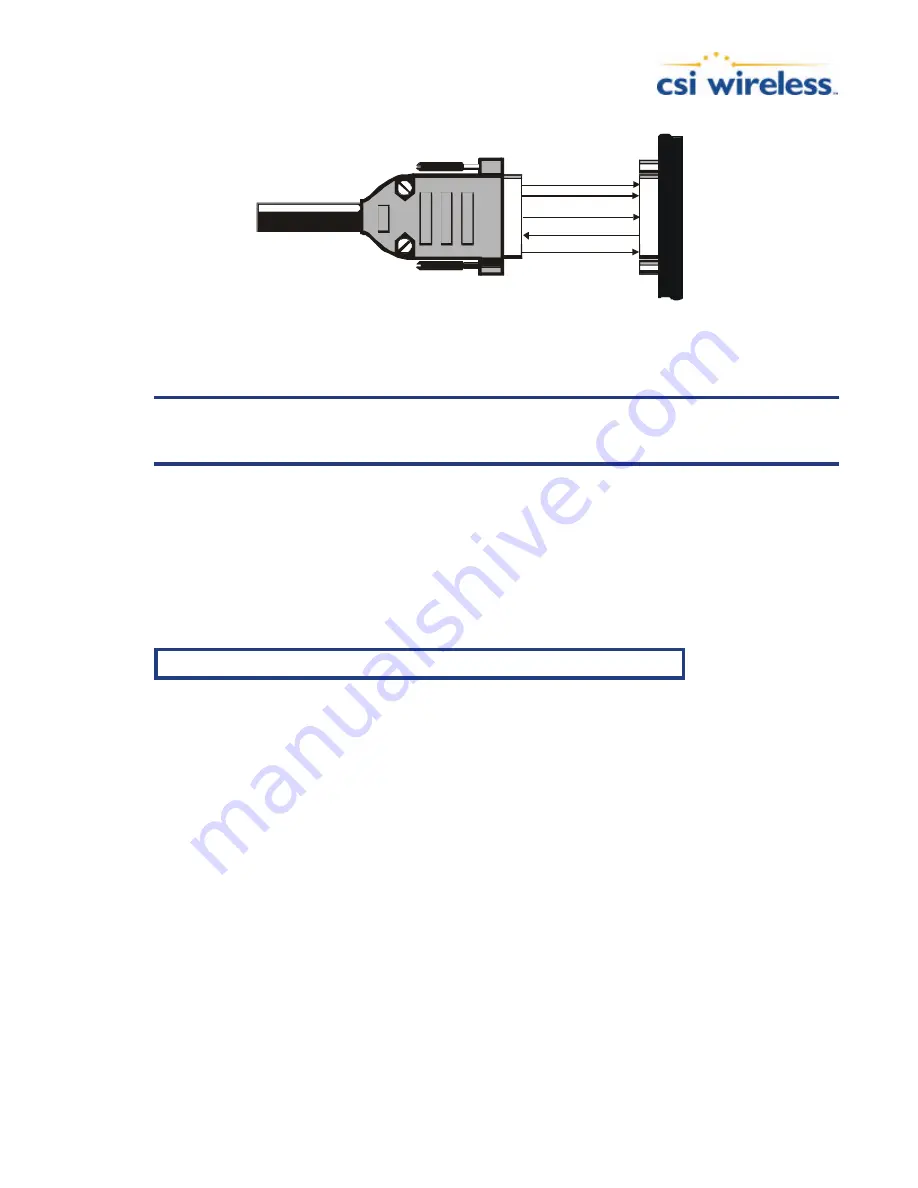
2 TX
3 RX
NMEA/Binary/
RTCM
5 GND
GND
TX
RX
SERES Port B
External Device
NMEA/Binary/
RTCM
1 PPS
6 Event Marker
Figure 2-4 Port B Interface
Refer to Appendix B for further interfacing information.
Note - For successful communications, the baud rate of the Vector Sensor serial ports
must be set to match that of the devices to which they are connected. Chapter 6
describes the baud rate change command.
2.8
LED Indicators
The Vector Sensor features diagnostic LEDs located on the front panel that provide a quick
indication of module status as described in the following table.
Table 2-5 LED Indicator Definitions
LED
Color
Function
PWR
Red
Power indicator - when the Vector Sensor is powered, this LED will
illuminate
PRIM GPS
Orange
Primary GPS lock indicator - this LED will blink a few times on startup
before the lamp test. Once the primary GPS achieves a solid lock, this LED
will remain illuminated.
SEC GPS
Orange
Secondary GPS lock indicator - this LED will blink a few times on startup
before the lamp test. Once the secondary GPS achieves a solid lock, this
LED will remain illuminated.
DIFF
Yellow
Differential lock indicator - This indicator will illuminate continuously when
the Vector Sensor has achieved a solid SBAS lock with better than a 150
bit error rate (BER) or when it is successfully receiving externally input
RTCM corrections. If the SBAS BER is higher than 150 but the receiver is
still locked, this LED will blink, showing that lock is marginal.
DGPS
Green
DGPS position indicator - this LED will illuminate when the receiver has
achieved a differential position and the psuedorange residuals are below
that set with the $JLIMIT command. The default value is a psuedorange
residual of better than 10.0 meters. If the residual value is worse than the
current threshold, the green DGPS LED will blink indicating that
differential mode has been attained but that the residual has not yet met
the threshold.
Heading
Blue
Heading indicator - this LED will illuminate when the Vector Sensor has
computed an accurate RTK-based GPS heading.







































































