

























Pigeon 2.0
User’s Guide
___ www.ctr-electronics.com ______________________ 1/31/2022
Cross The Road Electronics Page 12 ____________________________ 1/31/2022
2.3. Gyroscope Sensitivity Error
Gyroscopes may have a range in the reported angular rate of their measurements (despite being advertised as
being constant). As a result, a gyroscope will typically have
sensitivity error
. This can cause a consistent
under/over-reporting of measured yaw compared to actual rotation.
Pigeon 2.0 gyroscope sensitivities are factory calibrated. However different applications may require end-user to
provide additional trimming. The procedure below can be used to measure and trim the sensitivity error
correction.
This can be measured by the following procedure:
1.
First drive the robot to immoveable flat obstacle. A wall works best against the robot’s flattest surface
.
2.
Zero the yaw and accumulated gyro Z
3.
Drive the robot in a zero turn at max speed for 10 rotations
4.
Drive back up against the obstacle and read Yaw. It should be 3600 (± expected drift for the duration of the
test) degrees.
5.
Drive the robot in a zero turn at max speed in the opposite direction for 10 rotations
6.
Drive back up against the obstacle and read Yaw. It should be 0 (± expected drift for the duration of the test)
degrees
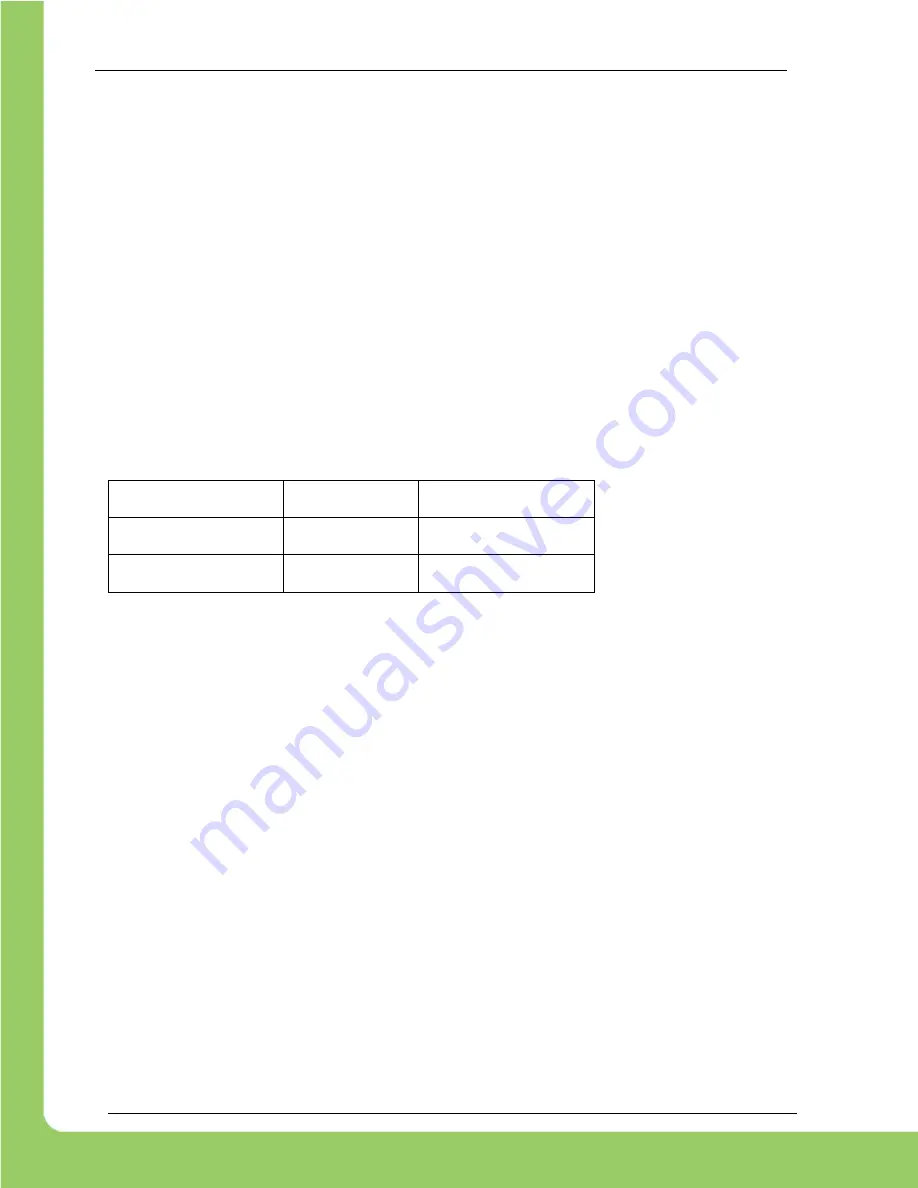
Using table below, determine if sensitivity error is likely.
Step 4
Error is low
Step 4
Error is high
Step 6
Error is low
No sensitivity error
Possible sensitivity error
Step 6
Error is high
Inconclusive
Inconclusive





























































