


















Pigeon 2.0
User’s Guide
___ www.ctr-electronics.com ______________________ 1/31/2022
Cross The Road Electronics Page 22 ____________________________ 1/31/2022
6.6.1.
Custom Mounting Orientation
–
Explicit Values
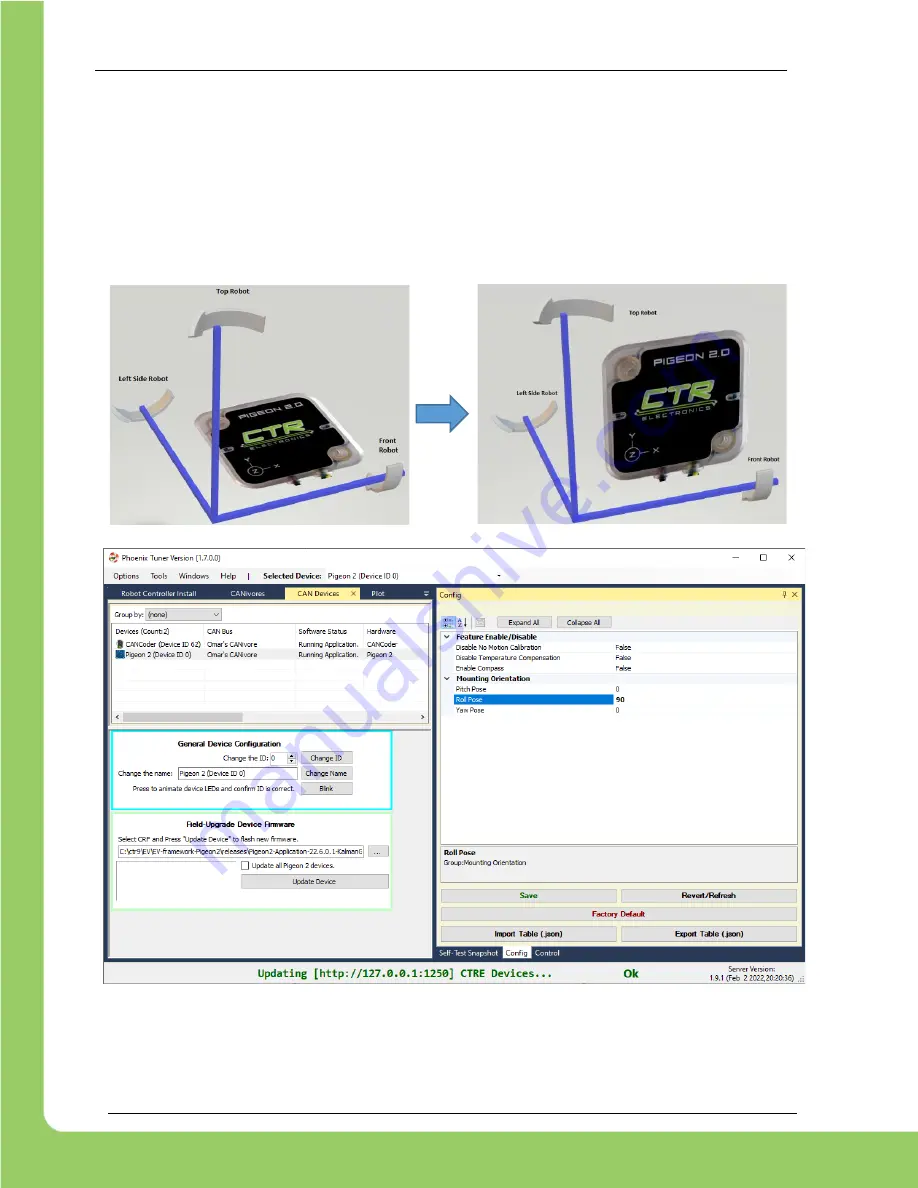
As an example, suppose the mount orientation is modified so that Pigeon is upright (vertical) inside the robot
platform.
This would be expressed as rotation about the IMU’s
X Axis
or a
+90 degree Roll
.
If the Mount Orientation Configuration Values (Yaw, Pitch, Roll) are set to (0 deg, 0 deg, +90 deg)
Note (1,2)
, the
Pigeon 2 will re-orient the Euler Angles (and Gravity Vector / Quaternion) so that Pitch and Roll will report 0 deg.
Additionally, rotation about the top-robot axis will be measured as Yaw (ideal for ground vehicles).
Note 1:
The Mount Orientation Angles can be specified with Phoenix Tuner or with Phoenix API.
Note 2:
The order of the signals in Tuner may be alphabetically ordered, and not Yaw/Pitch/Roll. Take care when entering values manually.







































































