















Pigeon 2.0
User’s Guide
___ www.ctr-electronics.com ______________________ 1/31/2022
Cross The Road Electronics Page 25 ____________________________ 1/31/2022
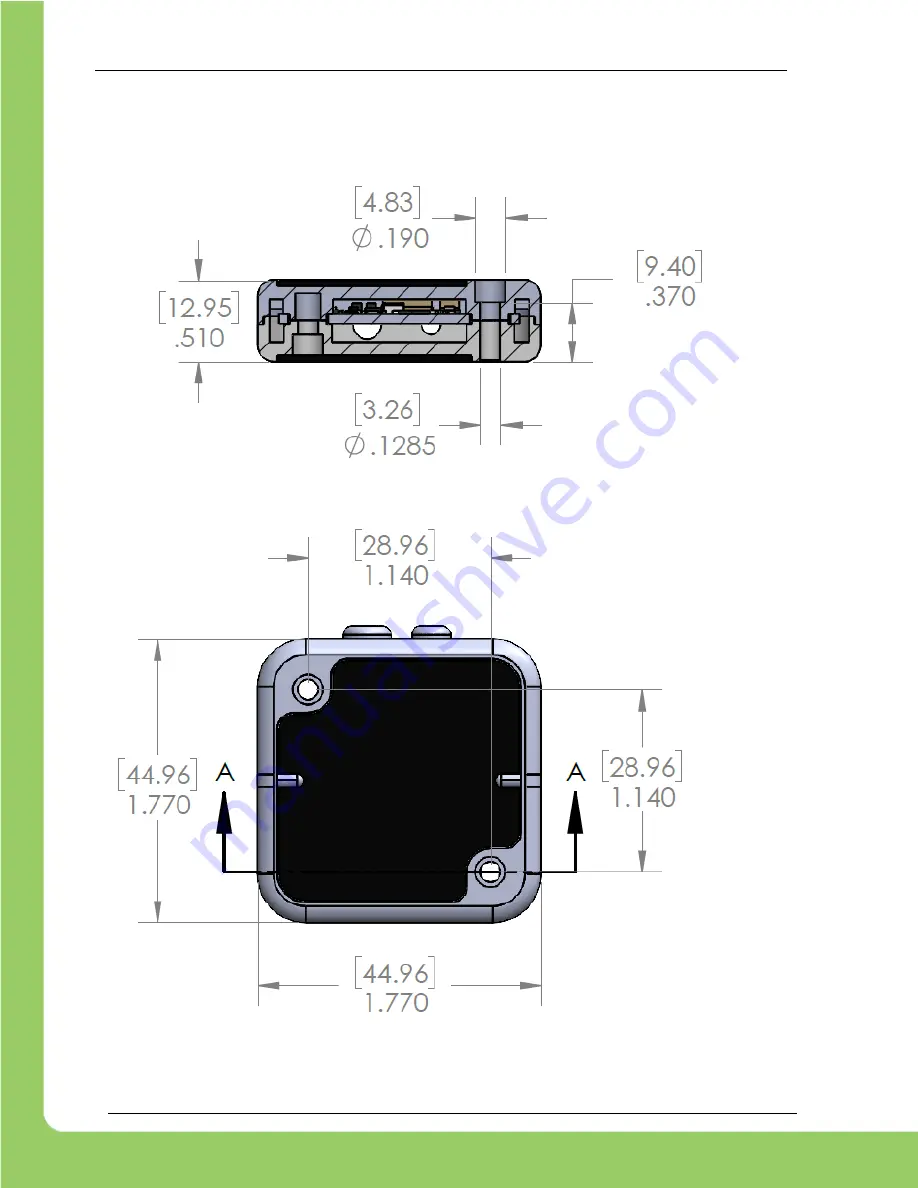
8. Mechanical Drawings
The CTR Electronics Pigeon 2.0 is a state-of-the-art electronic device that enhances control and precision in robotics. To tap into its full potential, we provide a comprehensive User Manual available for free download on our website. Explore the extensive features and functionalities of the Pigeon 2.0 at your own pace!
Pigeon 2.0
User’s Guide
___ www.ctr-electronics.com ______________________ 1/31/2022
Cross The Road Electronics Page 25 ____________________________ 1/31/2022
8. Mechanical Drawings







































































