
























Pigeon 2.0
User’s Guide
___ www.ctr-electronics.com ______________________ 1/31/2022
Cross The Road Electronics Page 10 ____________________________ 1/31/2022
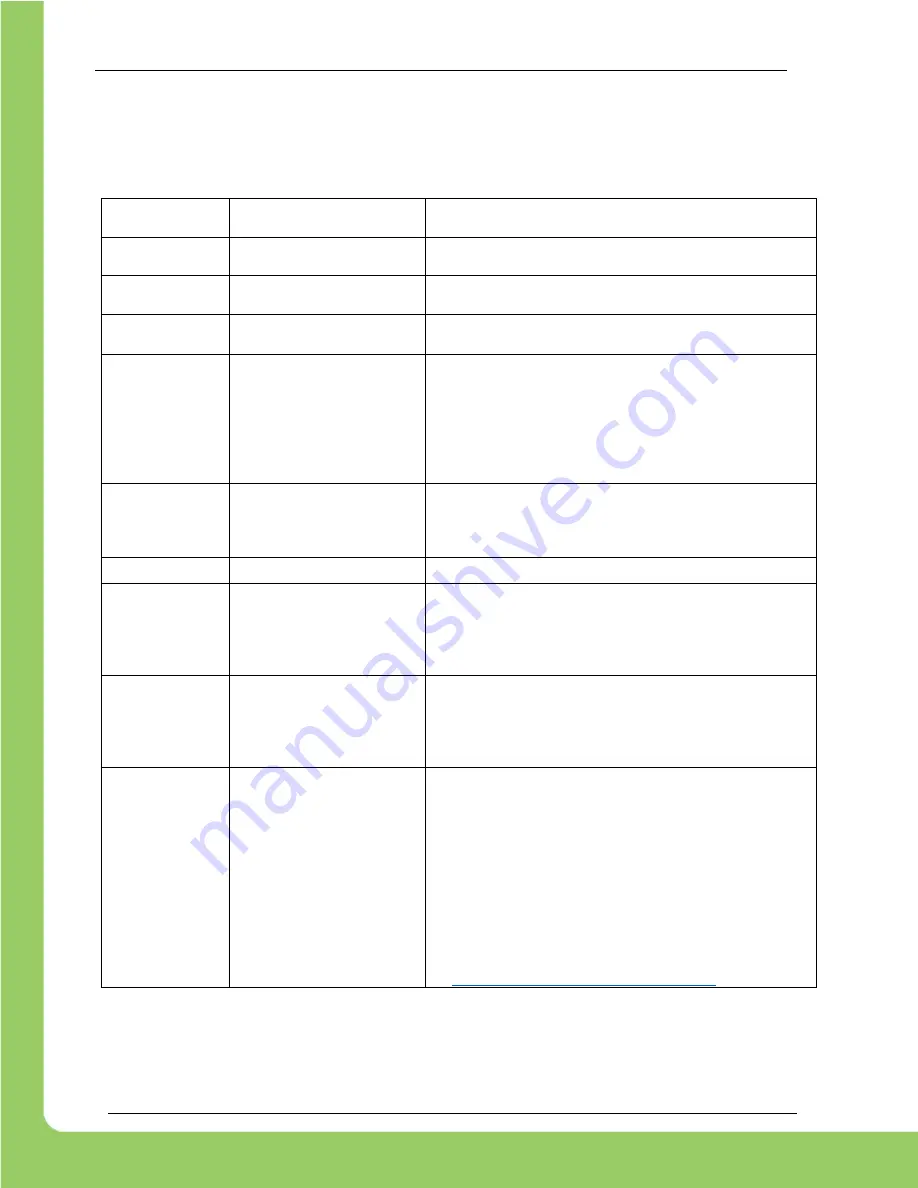
1.7. Changes between Pigeon 1 and Pigeon 2
Pigeon 2.0 is the next evolution in Pigeon IMU. Listed below are the differences between the latest iteration and
the original Pigeon IMU.
Note 1:
Both Pigeon 1 and Pigeon 2 use a right-handed orientation, and Pigeon 2 defaults to Z-axis up (similar to Pigeon 1). However, Pigeon
2 uses an X forward orientation to better match the academic research papers used in the development of the product.
Symbol
Pigeon IMU
(Version 1)
Pigeon 2.0
Boot
Requirements
5 seconds of stillness
No requirements
6 Axis angle drift
(
no-motion
)
15 deg per hour
0.12 degrees per hour
6 Axis angle drift
(
motion
)
1 deg per minute
0.4 deg per minute (with 4 second no-motion event)
1 deg per minute (instantly after boot-up)
Axes conventions
+X points to right
+Y points to forward
+Z points to sky
Pitch is about +X
Roll is about +Y
Yaw is about +Z
+X points forward.
+Y points to the left.
+Z points to the sky.
Pitch is about +Y
Roll is about +X
Yaw is about +Z
Mount
orientation
Must be mounted flat
and level (Z axis pointed
up)
Mount in any orientation.
Orientation does not need to be purely vertical or
horizontal.
Pitch and Roll can be zeroed this way as well.
Enclosure
None
Polycarbonate Enclosure
Communication
CAN bus
Gadgeteer Ribbon
Cable
CAN bus
CAN FD bus (CANivore)
User
Requirements
(Indoor 6-axis
applications)
Temperature
Calibration for best
performance.
None for best performance.
Select Mount Orientation if using non-default orientation.
General Software
API Changes
PigeonIMU
class
WPI_PigeonIMU
class
Pigeon2
class
WPI_Pigeon2
class
getState
() is not available
–
there is no need as the IMU is
always read.
getFusedHeading
() is not available
–
there is no need as
IMU Yaw is the fused heading in all circumstances.
Use
getYaw()
instead.
Full Software documentation available at:



































































