















6.3 Interface with Microcontroller
To control the motor with a microcontroller, set the jumpers as below:
JP4 : Don’t Care
JP6 : EXT PWM
Truth table for the control logic:
PWM
DIR
Output A
Output B
Low
X (Don’t Care)
Low
Low
High
Low
High
Low
High
High
Low
High
**
Please do note that to set either DIR or PWM pin at LOW condition first when power is
on.
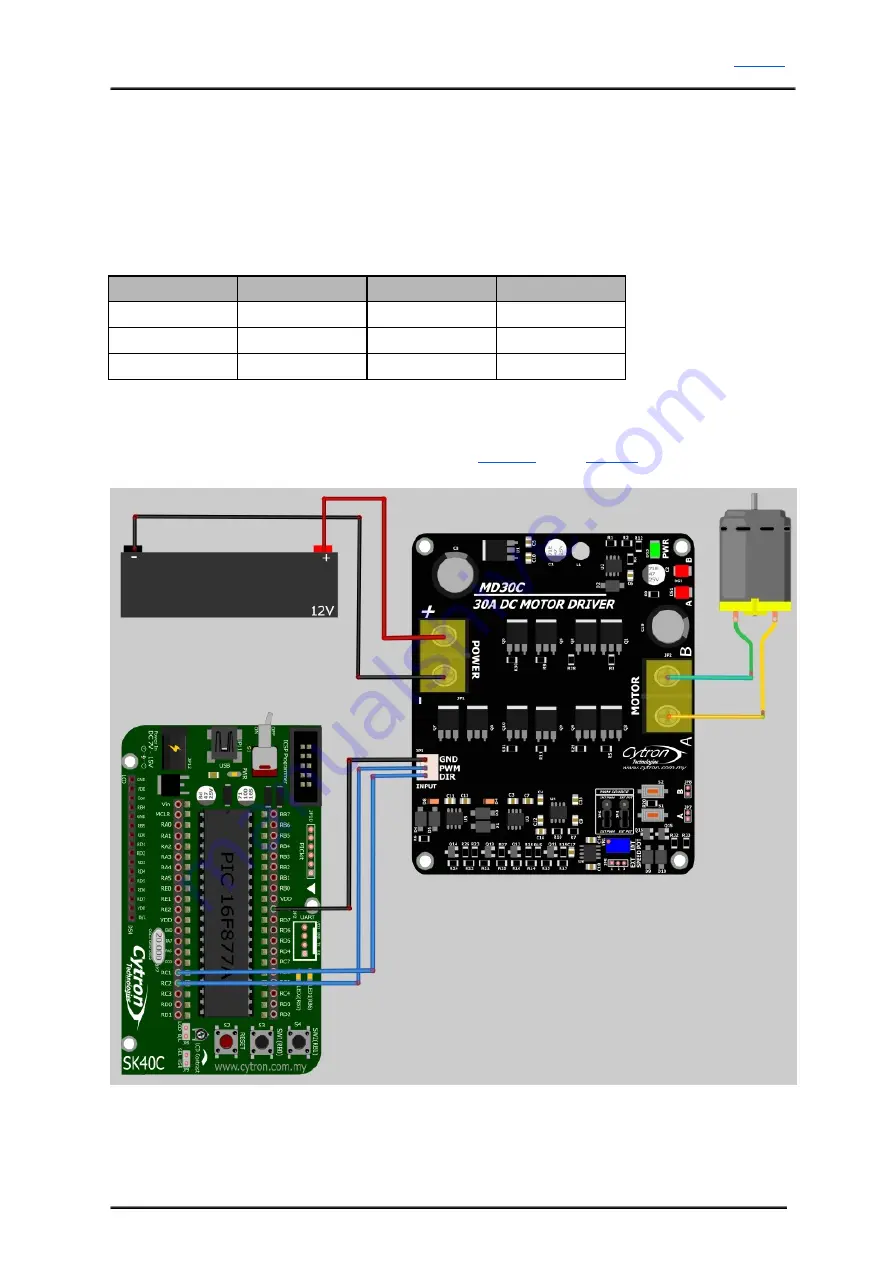
Picture below shows an example of connecting the
.
Created by Cytron Technologies Sdn. Bhd. – All Right Reserved
16







































































