





















Product User’s Manual –
6.
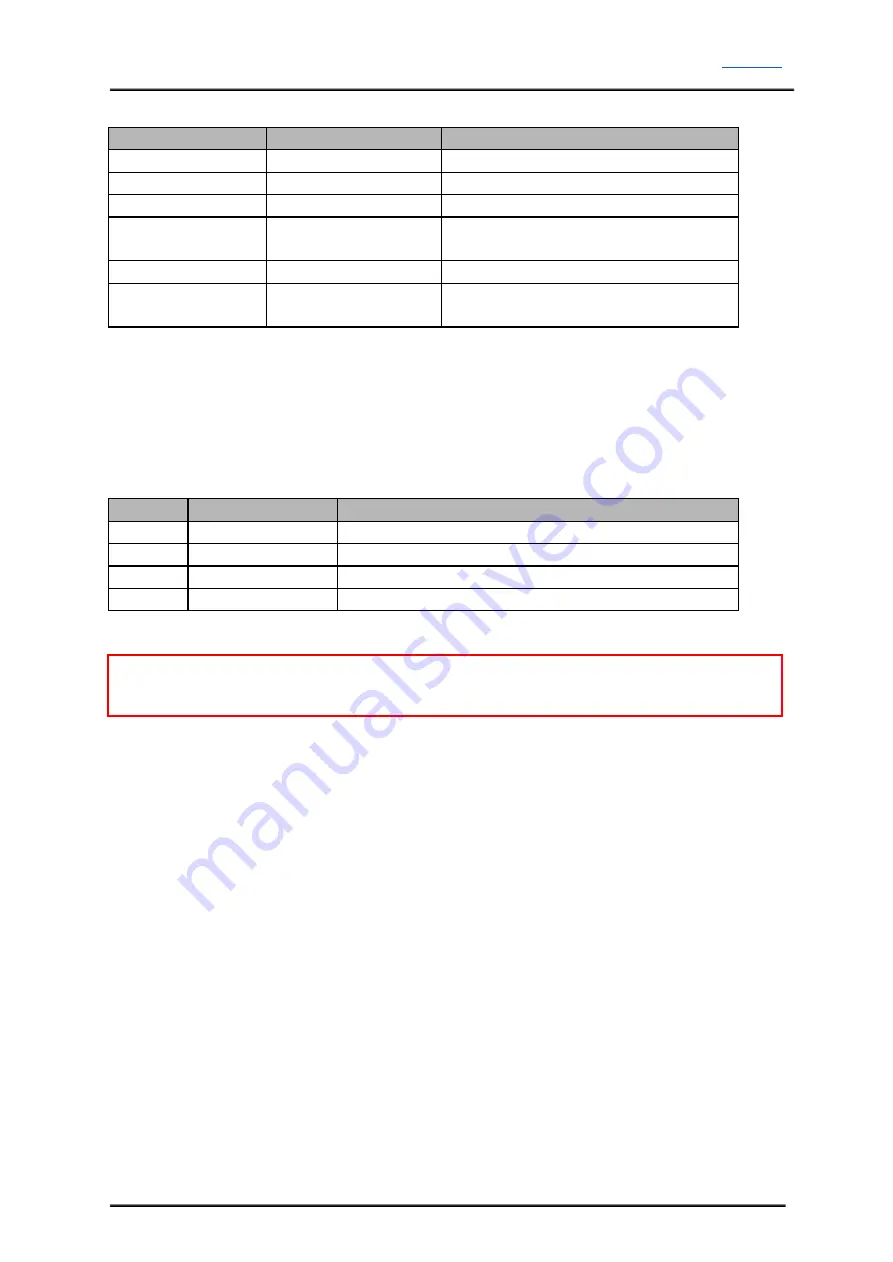
LED ERR – Error LED. The number of blinks is corresponding to the error.
Number of Blinks Error
Description
Off
No Error
No error has been detected.
2
Input Error
Invalid or no input detected.
3
Lipo Undervoltage
The LiPo battery voltage is too low.
4
Over Current
Over current is detected and current
limiting is operating.
5
Over Temperature
The board temperature is too high.
6
MOSFET Driver
Error
Error detected by the MOSFET driver.
7.
Test Button B – When this button is pressed, current flows from output B to A and
motor will turn CCW (or CW depending on the connection).
8.
Test Button A – When this button is pressed, current flows from output A to B and
motor will turn CW (or CCW depending on the connection).
9.
Input
Pin No. Pin Name
Description
1
IN2
Input channel 2.
2
IN1
Input channel 1.
3
+5V
+5V output. Do not connect to another 5V source.
4
Gnd
Ground.
Warning:
The +5V output is designed to power the
RC receiver only
. Do not connect any
RC servo
to the RC receiver and do not use the +5V output to power any other circuit.
10.
Mode Selection DIP Switch – Used to select the input mode.
11.
LED PWR – Power LED. Should be on when the board is powered.
Created by Cytron Technologies Sdn. Bhd. – All Rights Reserved
7







































































