











0mm
10mm
20mm
30mm
40mm
50mm
0 inch
2 inch
1 inch
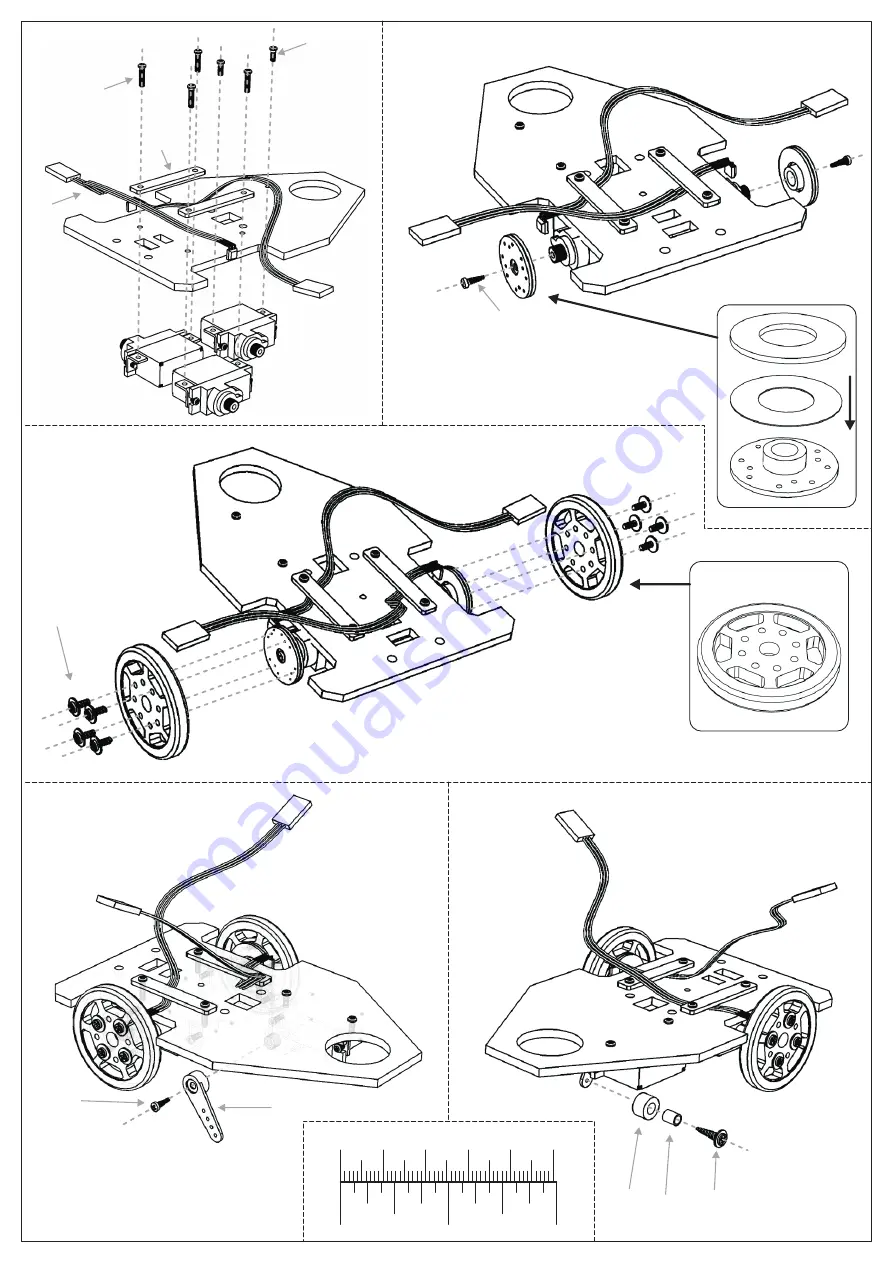
Step 4
:
Step 6
:
24
19
13
Step 7
:
15
8
Step 3
:
15
Step 5
:
12
Step 1
7
22
23
11
14
21
25
left
motor
right
motor
servo
Attach the 8 pole magnets to the round
servo horns using the adhesive rings
provided. Attached to the motors with
M2x5mm screws.
Loosen the screws holding the fibreboard strips and adjust the
wheel sensors so that they are close to the magnets but not
touching. Do not over tighten the screws holding the fibrestrips.
Center your servo and fit the
servo horn so it is pointing
straight down.



































































