











Installing the Software
:
Before you begin you will need to have the Arduino IDE version 0022 installed on your computer. The Arduino
IDE is a free integrated development enviroment that allows you to program Arduino development boards and
compatible products using a simplified version of C++.
Do not use later versions as the demonstration software will not work and the compiled program uses more
memory. If you do not have this software installed already then download it from here:
You may also need to install VCP (virtual com port) drivers for the CP2102 USB interface. You can download the
latest drivers from here:
The sample code for this robot should be available from the distributor. It is also available from the DAGU
product support site here:
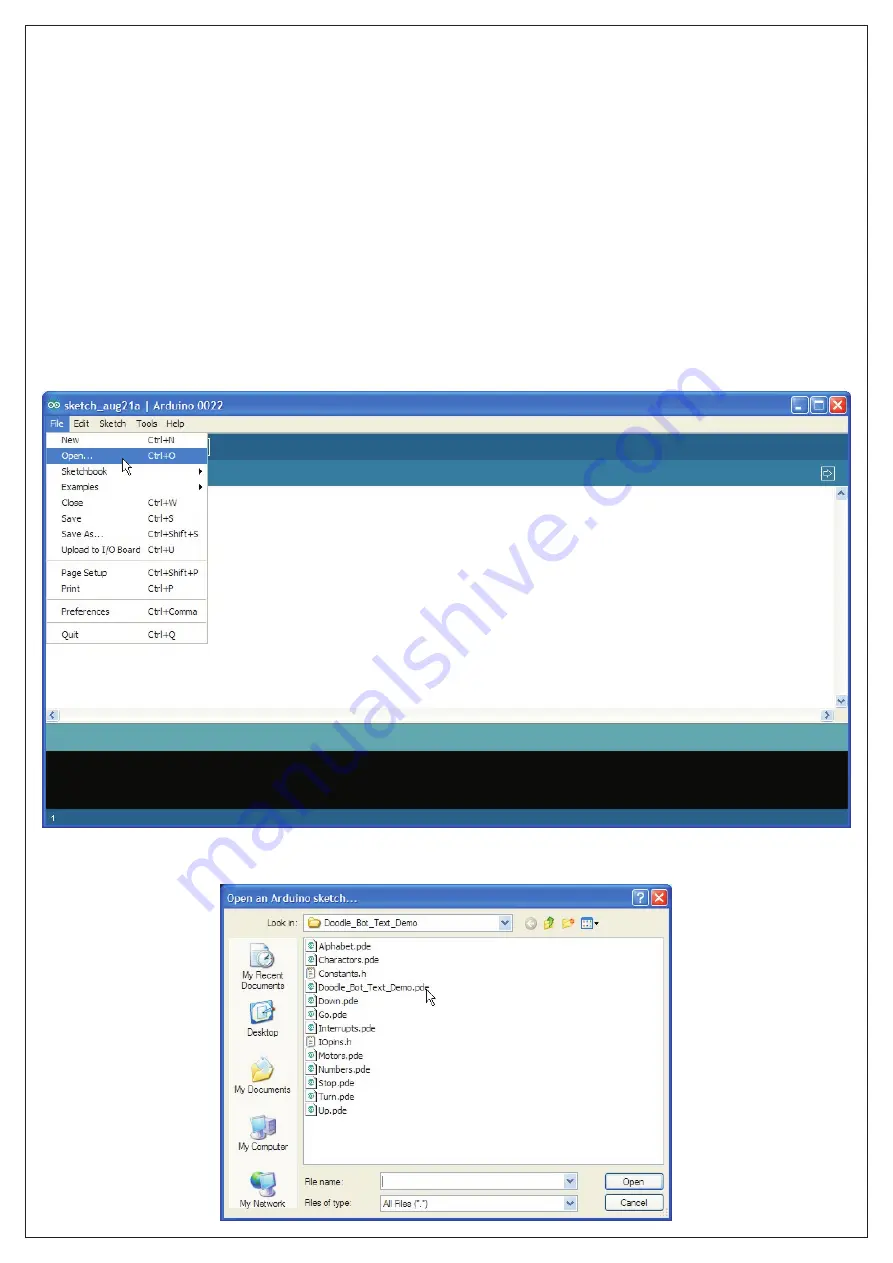
Unzip the sample code and copy the folder into your sketch pad or other directory of your choice. For Windows
users this will be a folder called "Arduino" in the "My Documents" folder. Run the Arduino IDE, go to the file menu
and select open.
http://arduino.cc/en/Main/Software
http://www.silabs.com/products/mcu/Pages/USBtoUARTBridgeVCPDrivers.aspx
https://sites.google.com/site/daguproducts/home/download-page
Select the "Doodle_Bot_Text_Demo" folder and then open the "Doodle_Bot_Text_Demo.pde" file.







































































