




























VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
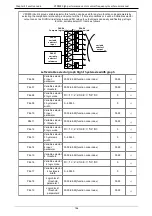
When PID reference source is digital setting, PID digital setting 0~3 depends on DI terminal function 43 (preset
PID terminal I ) and 44 ( preset PID terminal 2):
preset PID terminal1 preset PID terminal 2
PID Digital setting value(0.1%)
ineffective ineffective P40.06 * 100.0% / P40.05
ineffective effective P40.07 * 100.0% / P40.05
effective ineffective P40.08 * 100.0% / P40.05
effective effective P40.09 * 100.0% / P40.05
For example: When AI1 is used as PID feedback, if the full range corresponds to 16.0kg pressure and require
PID control to be 8.0kg; then set P40.05 PID feedback range to 16.00, PID digital reference terminal select to
P40.06, Set P40.06 (PID preset setting 0) to be 8.00
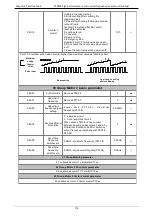
P40.10
PID reference
source selection
0:ref1
1:ref1+ref2
2:ref1-ref2
3:ref1*ref2
4:ref1/ref2
5:Min(ref1,ref2)
6:Max(ref1,ref2)
7(ref1+ref2)/2
8: fdb1and fdb2 switchover
0
☆
P40.11
PID feedback
source1
U n i t ’ s d i g i t 0
:
P I D f e e d b a c k
source1(fdb1)
0:AI1
1:AI2
2:AI3(option card)
3:AI4(option card)
4: PLUSE(HDI)
5: Communication
6: Motor rated output current
7: Motor rated output frequency
8: Motor rated output torque
9: Motor rated output frequency
Ten’s digit : PID feedback source2 (fdb2)
Same as Unit’s digit
00
☆
P40.13
PID feedback
function selection
0:fdb1
1:fdb1+fdb2
2:fdb1-fdb2
3:fdb1*fdb2
4:fdb1/fdb2
5:Min(fdb1,fdb2)Take fdb1.fdb2 smaller
value
6:Max(fdb1,fdb2) Take fdb1.fdb2 bigger
value
7: (ref1+ref2)/2
8: fdb1and fdb2 switchover
0
☆
P40.14
PID output feature
0: PID output is positive: when the
feedback signal exceeds the PID
reference value, the output frequency of
the inverter will decrease to balance the
PID. For example, the strain PID control
during wrapup
1: PID output is negative: When the
feedback signal is stronger than the PID
reference value, the output frequency of
the inverter will increase to balance the
PID. For example, the strain PID control
during wrapdown
0
☆
97
Summary of Contents for VFD500 Series
Page 3: ... 3 ...







































































