





























418
Speed PID integral time
(SPEED int. time)
Value:
20.00 - 999.99 ms (1000 = OFF)
100 ms
Function:
The integral time determines how long the PID regu-
lator takes to correct the error. The greater the error,
the quicker the integrator frequency contribution will
increase. The integral time is the time the integrator
needs to achieve the same change as the proportional
amplification.
Description of choice:
Quick regulation is obtained through a short integral
time. However, if this time is too short, it can make the
process unstable. If the integral time is long, major de-
viations from the required reference may occur, since
the process regulator will take long to regulate if an
error has occurred.
419
Speed PID differential time
(SPEED diff. time)
Value:
0.00 (OFF) - 200.00 ms
20.00 ms
Function:
The differentiator does not react to a constant error. It
only makes a contribution when the error changes.
The quicker the error changes, the stronger the gain
from the differentiator will be. The contribution is pro-
portional to the speed at which errors change.
Description of choice:
Quick control is obtained by a long differential time.
However, if this time is too long, it can make the proc-
ess unstable. When the differential time is 0 ms, the D-
function is not active.
420
Speed PID D- gain limit
(SPEED D-GAIN LIM)
Value:
5.0 - 50.0
5.0
Function:
It is possible to set a limit for the gain provided by the
differentiator. Since the D-gain increases at higher fre-
quencies, limiting the gain may be useful. This enables
obtaining a pure D-gain at low frequencies and a con-
stant D-gain at higher frequencies.
Description of choice:
Select the required gain limit.
421
Speed PID lowpass filter time
(speed filt. time)
Value:
20 - 500 ms
100 ms
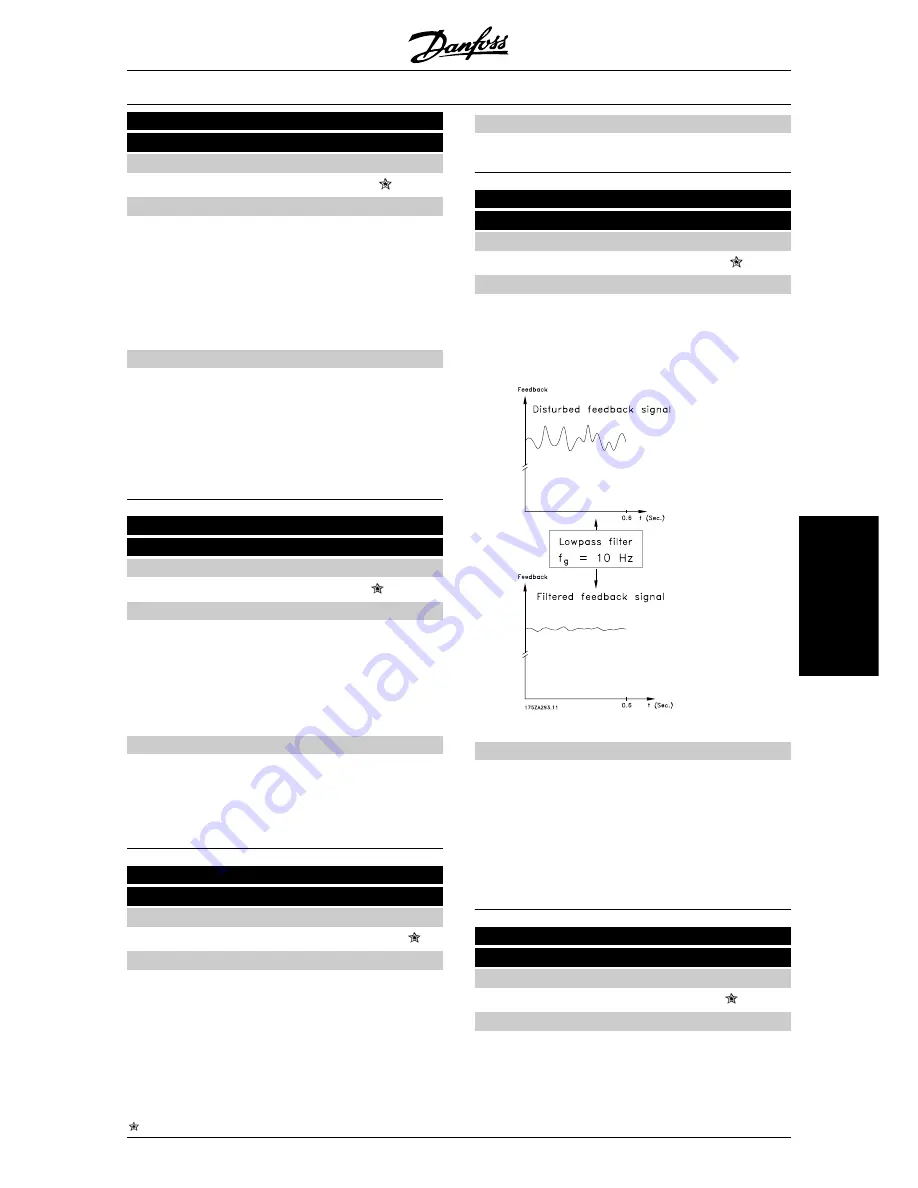
Function:
Noise in the feedback signal is dampened by a first
order lowpass filter to reduce the noise's impact on the
regulation. This might be an advantage, e.g. if there is
a great amount of noise on the signal. See drawing.
Description of choice:
If a time constant (t) of 100 ms is programmed, the cut-
off frequency for the lowpass filter will be 1/0.1 = 10
RAD/sec., corresponding to (10 / 2 x
π
) = 1.6 Hz. The
PID regulator will then only regulate a feedback signal
that varies with a frequency of less than 1.6 Hz. If the
feedback signal varies by a higher frequency than 1.6
Hz, it will be dampened by the lowpass filter.
423
U1 voltage
(U1 voltage)
Value:
0.0 - 999.0 V
par. 103
Function:
Parameters 423-428 are used when in parameter 101
Torque characteristic
a selection has been made of
VLT
®
2800 Series
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.27.A2.02 - VLT
®
is a registered Danfoss trademark
47
Programming
Summary of Contents for VLT 2800 Series
Page 1: ...VLT 2800 MG27A202 VLT 2800 Operating Instructions Operating Instructions...
Page 62: ...192H4893 VLT 2800 Series MG 27 A2 02 VLT is a registered Danfoss trademark 61 Installation...
Page 76: ...VLT 2800 Series MG 27 A2 02 VLT is a registered Danfoss trademark 75 All about VLT 2800...
Page 77: ...VLT 2800 Series 76 MG 27 A2 02 VLT is a registered Danfoss trademark...
Page 103: ......







































































