





























10.6 Motor
Any 3-phase asynchronous standard motor can be used
with a drive.
Terminal
Function
96
U/T1
97
V/T2
98
W/T3
99
Ground
Table 10.17 Motor Cable Terminals Providing Clockwise
Rotation (Factory Default)
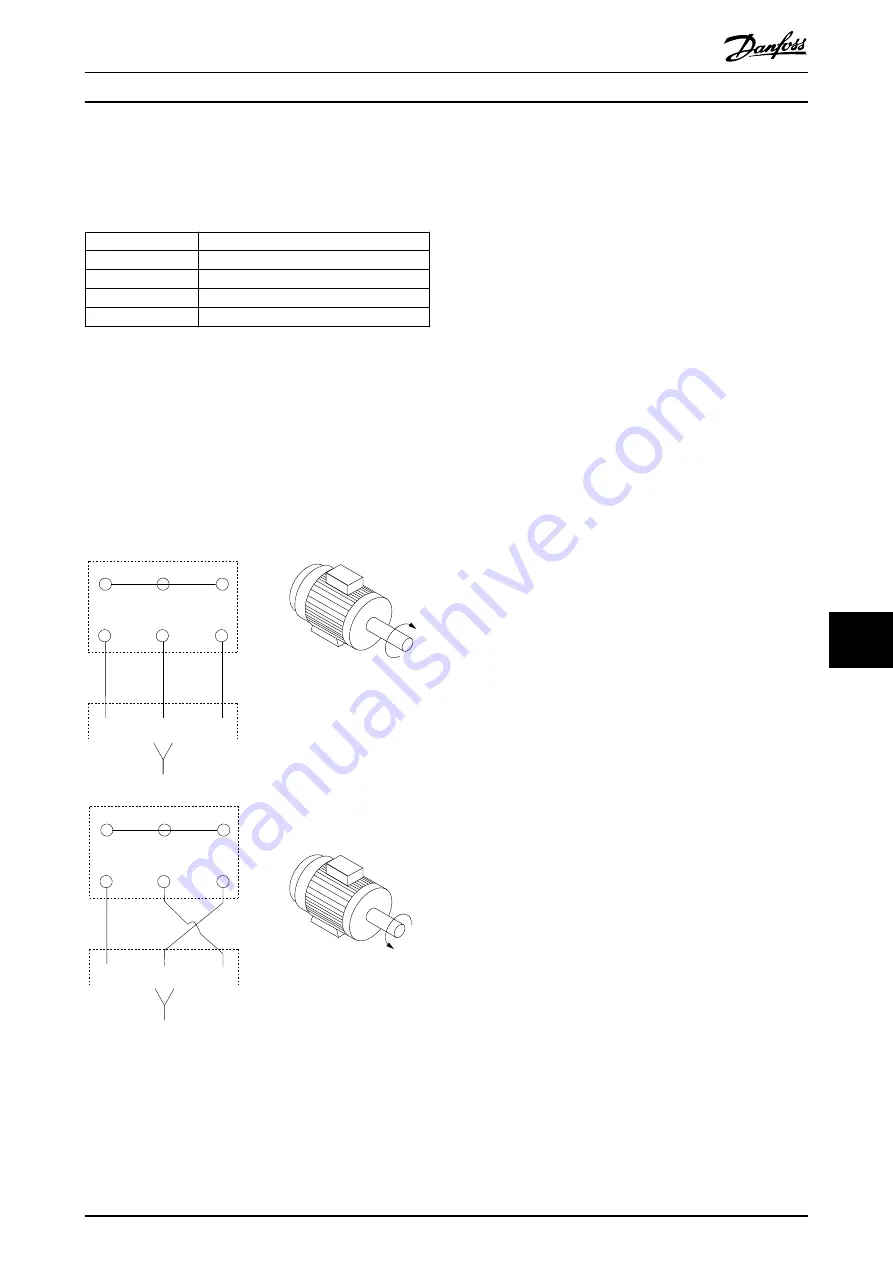
The direction of rotation can be changed by switching 2
phases in the motor cable, or by changing the setting of
parameter 4-10 Motor Speed Direction
.
Motor rotation check can be performed using
parameter 1-28 Motor Rotation Check
and following the
configuration shown in
175HA036.11
U
1
V
1
W
1
96
97
98
FC
Motor
U
2
V
2
W
2
U
1
V
1
W
1
96
97
98
FC
Motor
U
2
V
2
W
2
Illustration 10.9 Changing Motor Rotation
10.6.1 Motor Thermal Protection
The electronic thermal relay in the drive has received UL
approval for single motor overload protection, when
parameter 1-90 Motor Thermal Protection
is set for
ETR Trip
and
parameter 1-24 Motor Current
is set to the rated motor
current (see the motor nameplate).
For motor thermal protection, it is also possible to use the
VLT
®
PTC Thermistor Card MCB 112 option. This card
provides ATEX certification to protect motors in explosion
hazardous areas Zone 1/21 and Zone 2/22. When
parameter 1-90 Motor Thermal Protection
, set to
[20] ATEX
ETR
, is combined with the use of MCB 112, it is possible to
control an Ex-e motor in explosion hazardous areas.
Consult the
programming guide
for details on how to set
up the drive for safe operation of Ex-e motors.
10.6.2 Parallel Connection of Motors
The drive can control several parallel-connected motors.
For different configurations of parallel-connected motors,
see
.
When using parallel motor connection, observe the
following points:
•
Run applications with parallel motors in U/F
mode (volts per hertz).
•
VVC
+
mode can be used in some applications.
•
Total current consumption of motors must not
exceed the rated output current I
INV
for the drive.
•
Problems can occur at start and at low RPM if
motor sizes are widely different because the
relatively high ohmic resistance in the stator of a
small motor demands a higher voltage at start
and at low RPM.
•
The electronic thermal relay (ETR) of the drive
cannot be used as motor overload protection.
Provide further motor overload protection by
including thermistors in each motor winding or
individual thermal relays.
•
When motors are connected in parallel,
parameter 1-02 Flux Motor Feedback Source
cannot
be used, and
parameter 1-01 Motor Control
Principle
must be set to
[0] U/f
.
Electrical Installation Con...
Design Guide
MG38C202
Danfoss A/S © 01/2018 All rights reserved.
153
10
10







































































