





























Feedback conversion
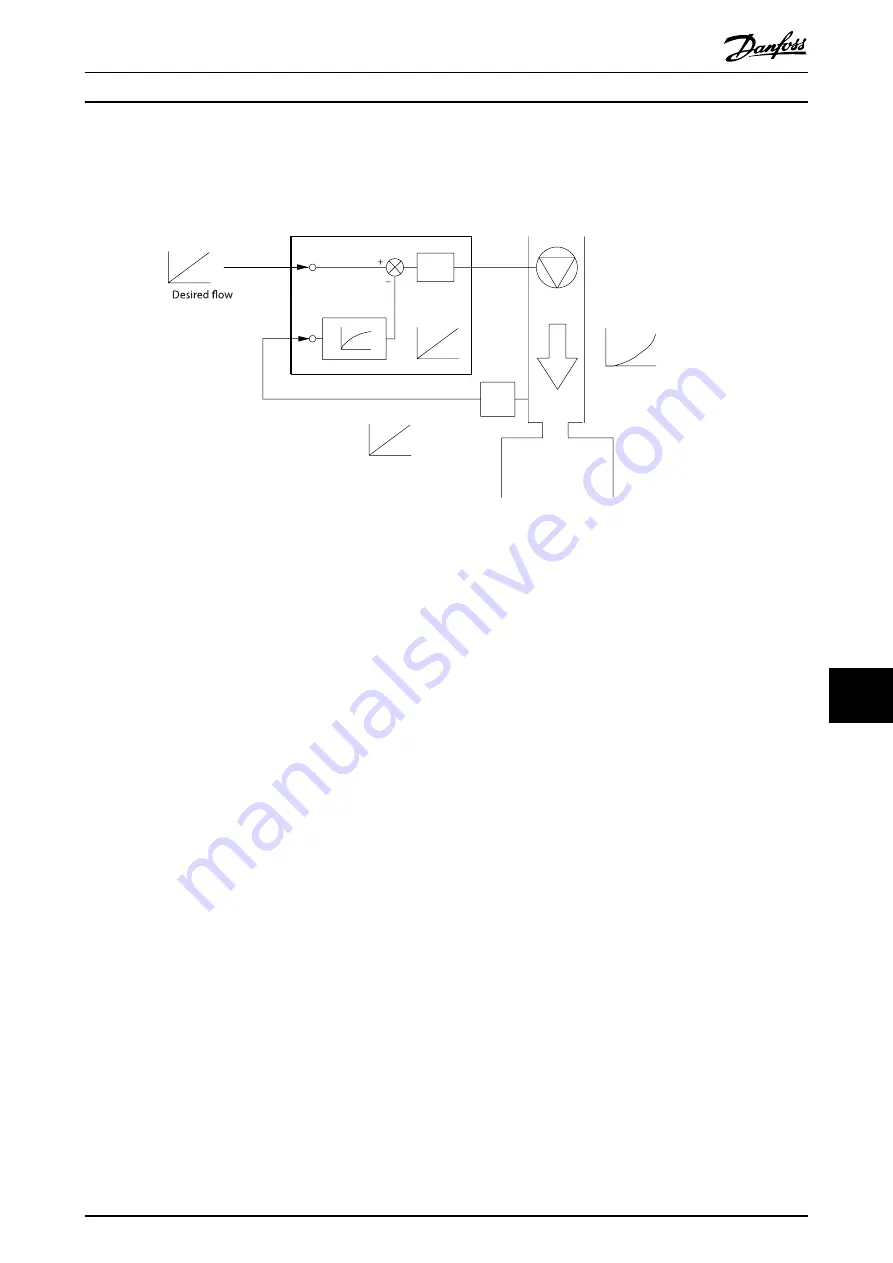
In some applications, it is useful to convert the feedback signal. One example is using a pressure signal to provide flow
feedback. Since the square root of pressure is proportional to flow, the square root of the pressure signal yields a value
proportional to the flow, see
.
130BF834.10
Reference signal
Reference
FB conversion
FB signal
P
Flow
FB
P
Flow
PID
P
Parameter 20-01
Parameter 20-04
Parameter 20-07
Illustration 11.5 Feedback Conversion
11.2.4 Control Structure Overview
The control structure is a software process that controls the motor based on user-defined references (for example, RPM) and
whether feedback is used/not used (closed loop/open loop). The operator defines the control in
parameter 1-00 Configu-
ration Mode
.
The control structures are as follows:
Open-loop control structure
•
Speed (RPM)
•
Torque (Nm)
Closed-loop control structure
•
Speed (RPM)
•
Torque (Nm)
•
Process (user-defined units, for example, feet, lpm, psi, %, bar)
11.2.5 Open-loop Control Structure
In open-loop mode, the drive uses 1 or more references (local or remote) to control the speed or torque of the motor. There
are 2 types of open-loop control:
•
Speed control. No feedback from the motor.
•
Torque control. Used in VVC
+
mode. The function is used in mechanically robust applications, but its accuracy is
limited. Open-loop torque function works only in 1 speed direction. The torque is calculated based on current
measurement within the drive. See
chapter 12 Application Examples
.
In the configuration shown in
, the drive operates in open-loop mode. It receives input from either the LCP
(hand-on mode) or via a remote signal (auto-on mode).
Basic Operating Principles ...
Design Guide
MG38C202
Danfoss A/S © 01/2018 All rights reserved.
179
11
11







































































