





























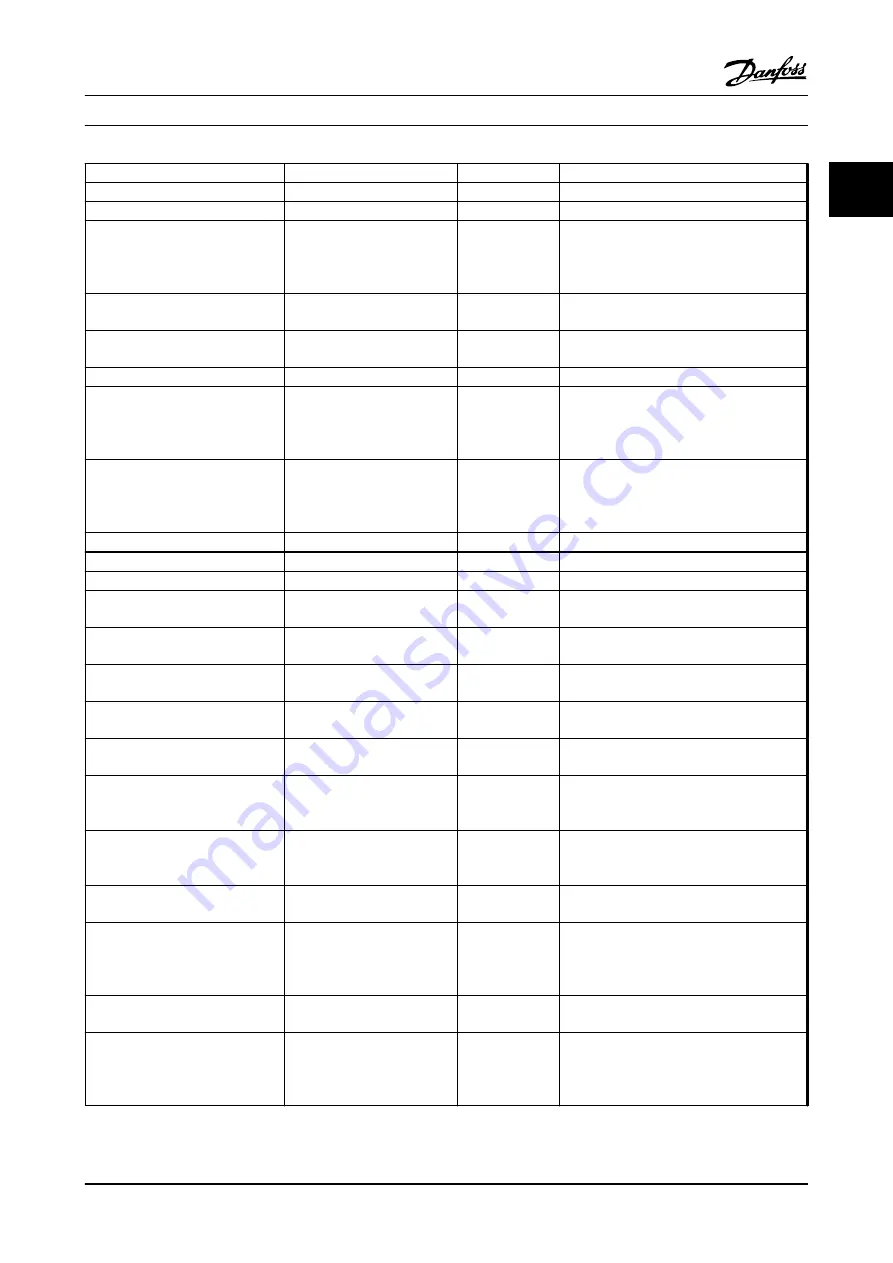
No & Name
Range
Default
Function
1-39 Motor Poles
2-100
4
Enter the number of motor poles
1-40 Back EMF at 1000 RPM
10–9,000
Size related
Line-Line RMS back EMF voltage at 1000 RPM
1-73 Flying Start
[0] Disabled
[1] Enabled
0
Select
[1] Enable
to enable the adjustable
frequency drive to catch a spinning motor,
e.g., in fan applications. When PM is selected,
Flying Start is enabled.
-4,999-4,999
0
The minimum reference is the lowest value
obtainable by summing all references.
-4,999-4,999
50
The maximum reference is the highest value
obtainable by summing all references.
-100–100%
0
Enter the setpoint.
0.05–3,600.0 s
Size related
Ramp-up time from 0 to rated 1-23 Motor
Frequency if Asynchron motor is selected;
ramp-up time from 0 to 1-25 Motor Nominal
Speed if PM motor is selected.
0.05–3,600.0 s
Size related
Ramp-down time from rated 1-23 Motor
Frequency to 0 if Asynchron motor is selected;
ramp-down time from 1-25 Motor Nominal
Speed to 0 if PM motor is selected.
4-12 Motor Speed Low Limit [Hz]
0.0–400 Hz
0.0 Hz
Enter the minimum limit for low speed
4-14 Motor Speed High Limit [Hz]
0–400 Hz
65 Hz
Enter the minimum limit for high speed
4-19 Max Output Frequency
0–400
Size related
Enter the maximum output frequency value
[0] Current
[1] Voltage
1
Select if terminal 54 is used for current or
voltage input
0–10 V
0.07 V
Enter the voltage that corresponds to the low
reference value.
0–10 V
10 V
Enter the voltage that corresponds to the low
high reference value.
0-20 mA
4
Enter the current that corresponds to the high
reference value.
0-20 mA
20
Enter the current that corresponds to the high
reference value.
6-24 Terminal 54 Low Ref./Feedb.
Value
-4,999-4,999
0
Enter the feedback value that corresponds to
the voltage or current set in
6-25 Terminal 54 High Ref./Feedb.
Value
-4,999–4,999
50
Enter the feedback value that corresponds to
the voltage or current set in
/
6-26 Terminal 54 Filter Time
Constant
0–10 s
0.01
Enter the filter time constant.
20-81 PI Normal/ Inverse Control
[0] Normal
[1] Inverse
0
Select
[0] Normal
to set the process control to
increase the output speed when the process
error is positive. Select
[1] Inverse
to reduce
the output speed.
0–200 Hz
0
Enter the motor speed to be attained as a
start signal for commencement of PI control.
0–10
0.01
Enter the process controller proportional gain.
Quick control is obtained at high amplifi-
cation. However, if amplification is too great,
the process may become unstable
How to Program
VLT
®
HVAC Basic Drive Programming Guide
MG18B222 - VLT
®
is a registered Danfoss trademark
2-9
2
2







































































