





























Chapter 6 Control Modes of Operation
6-32
Revision June 2010
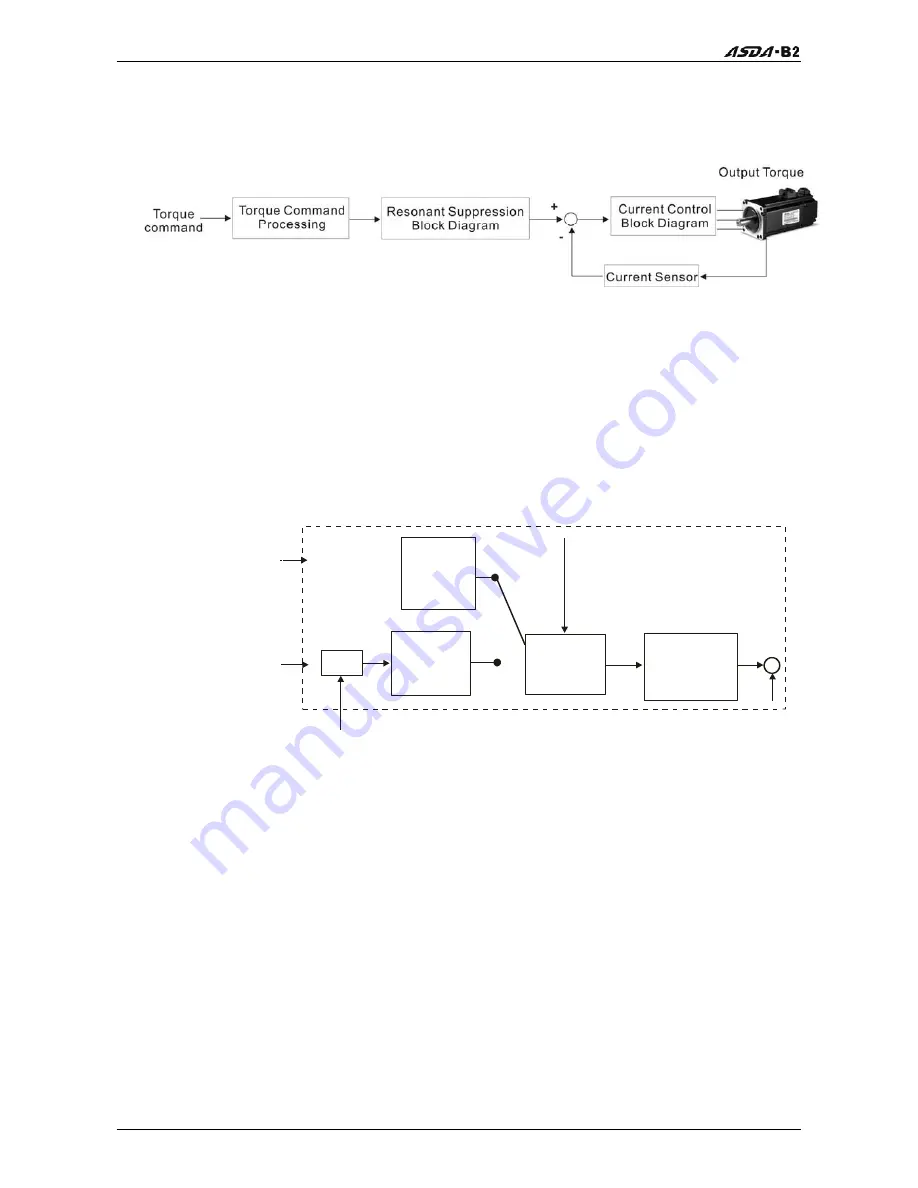
6.4.2 Structure of Torque Control Mode
Basic Structure:
The toque command processing is used to select the command source of torque control
according to chapter 6.4.1, including max. analog torque command (parameter P1-41)
and smoothing strategy of torque control mode. The current control block diagram is
used to manage the gain parameters of the servo drive and calculate the current input
provided to motor instantaneously. As the current control block diagram is too
complicated, setting the parameters of current control block diagram is not allowed. The
function and structure of torque command processing is shown as the figure below:
A/D
P1-12
~1-14
P1-41
P1-01
P1-07
TCM0,TCM1 signal of CN1
Command
selection
Low-pass
filter
(Command source:
Internal parameter)
(Command source:
External analog signal)
Analog signal
Internal
parameter
Proportion
Gain
The command source is selected according to the state of TCM0, TCM1 and parameter
P1-01 (T or Tz). Whenever the command signal needs to be more smoothly, we
recommend the users to use proportional gain (scalar) and low-pass filter to adjust torque.
Summary of Contents for ASD-B2-0121-B
Page 1: ......
Page 13: ...Table of Contents xii Revision June 2010 This page intentionally left blank...
Page 17: ...Chapter 1 Unpacking Check and Model Explanation 1 4 Revision June 2010 ECMA Series Servo Motor...
Page 87: ...Chapter 4 Display and Operation 4 12 Revision June 2010 This page intentionally left blank...
Page 131: ...Chapter 6 Control Modes of Operation 6 22 Revision June 2010 Time Domain...
Page 267: ...Chapter 8 MODBUS Communications 8 18 Revision June 2010 This page intentionally left blank...
Page 271: ...Chapter 9 Maintenance and Inspection 9 4 Revision June 2010 This page intentionally left blank...
Page 291: ...Chapter 11 Specifications 11 8 Revision June 2010 11 3 Servo Motor Speed Torque Curves...







































































