





























Chapter 14 PLC Function
|
C200 Series
14-9
14.4 Ladder Diagram
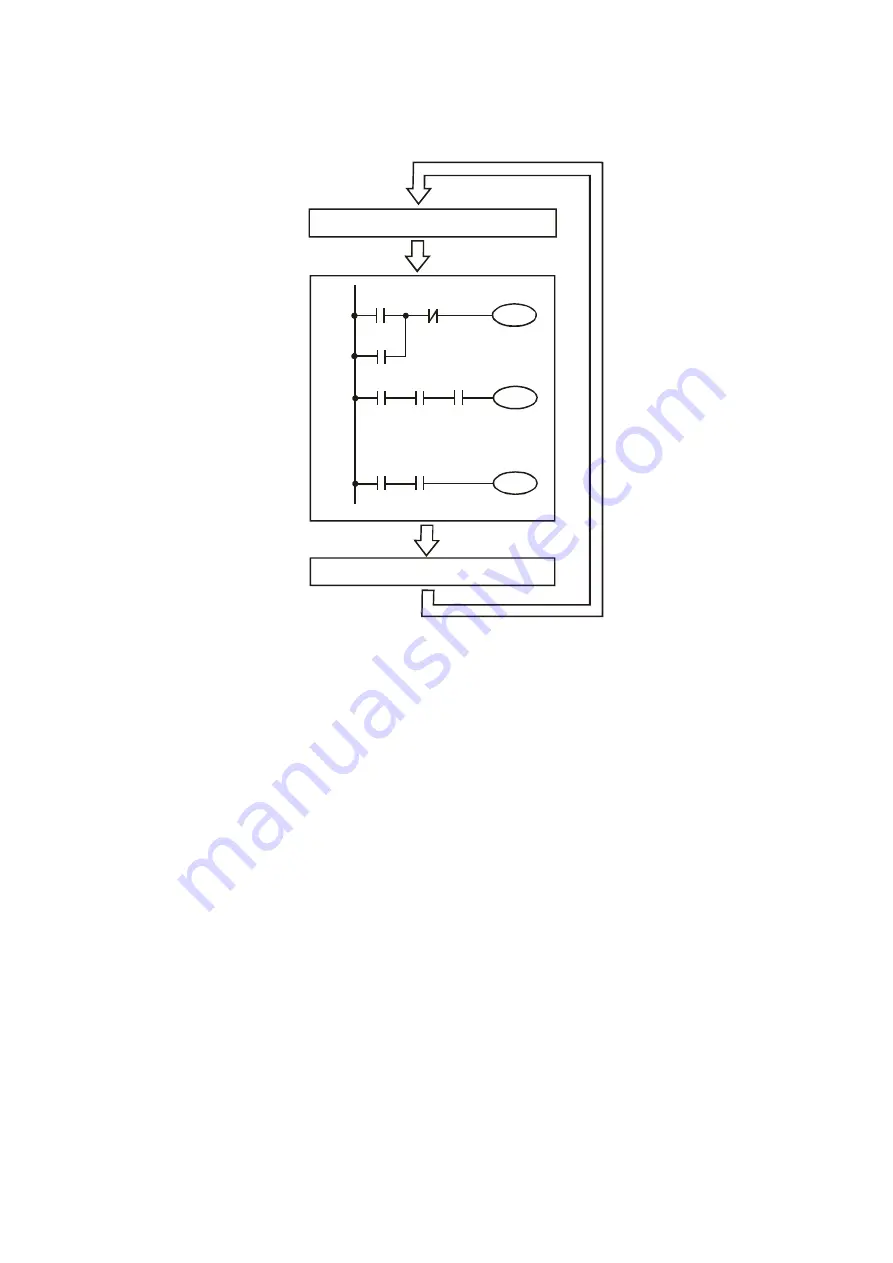
14.4.1 Program Scan Chart of the PLC Ladder Diagram
Calculate the result by
ladder diagram
algorithm (it doesn’t
sent to the outer output
point but the inner
equipment will output
immediately.)
Y0
X0
X1
Y0
Start
M100 X3
Y1
X10
:
:
X100 M505
Y126
End
Send the result to the output point
Read input state from outside
Repeats the
execution in
cycle.
14.4.2 Ladder Diagram
Ladder diagram is a diagram language that applied on the automatic control and it is also a
diagram that made up of the symbols of electric control circuit. PLC procedures are finished
after ladder diagram editor edits the ladder diagram. It is easy to understand the control flow
that indicated with diagram and also accept by technical staff of electric control circuit. Many
basic symbols and motions of ladder diagram are the same as mechanical and electrical
equipments of traditional automatic power panel, such as button, switch, relay, timer, counter
and etc.
The kinds and amounts of PLC internal equipment will be different with brands. Although
internal equipment has the name of traditional electric control circuit, such as relay, coil and
contact. It doesn’t have the real components in it. In PLC, it just has a basic unit of internal
memory. If this bit is 1, it means the coil is ON and if this bit is 0, it means the coil is OFF. You
should read the corresponding value of that bit when using contact (Normally Open, NO or
contact a). Otherwise, you should read the opposite sate of corresponding value of that bit
when using contact (Normally Closed, NC or contact b). Many relays will need many bits, such
as 8-bits makes up a byte. 2 bytes can make up a word. 2 words make up double word. When
using many relays to do calculation, such as add/subtraction or shift, you could use byte, word
Call 1(800)985-6929 for Sales
deltaacdrives.com
sales@deltaacdrives.com
Call 1(800)985-6929 for Sales
deltaacdrives.com
sales@deltaacdrives.com







































































