



























38
2.5
Setting Control Set of Motion Optimization
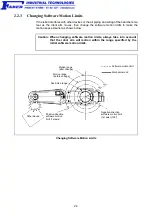
The optimum speed or acceleration will vary depending upon the payload and center of
gravity of the hand and/or workpiece that are to be set at the end of the robot flange.
Set the payload and center of gravity position of the hand or workpiece and the control
set of motion optimization according to the payload and the robot posture.
The mass of payload is a total mass of a hand and workpiece, expressed in gram.
For further information, see the PROGRAMMER'S MANUAL (I), Section 4.7, "Setting
the Master Control Parameters in User Preferences." For the setting procedure, refer
to the SETTING-UP MANUAL, Section 2.8 "Setting the Master Control Parameters of
the Payload, Center of Gravity, and Control Set of Motion Optimization."
2.6
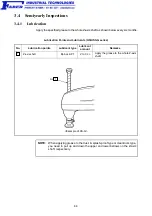
Setting Robot Installation Conditions
Depending on whether the robot is floor-mounted or overhead-mounted, the optimum
operating conditions differ.
However, as for horizontal articulated type; the HS-G series (floor-mount type) and
HSS-G series (overhead-mount type), the installation conditions are preset at the
factory. You do not need to change the factory default of the installation settings.







































































