

























10
1.2.3
Securing the Robot Unit
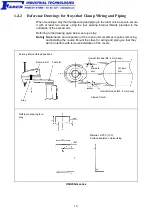
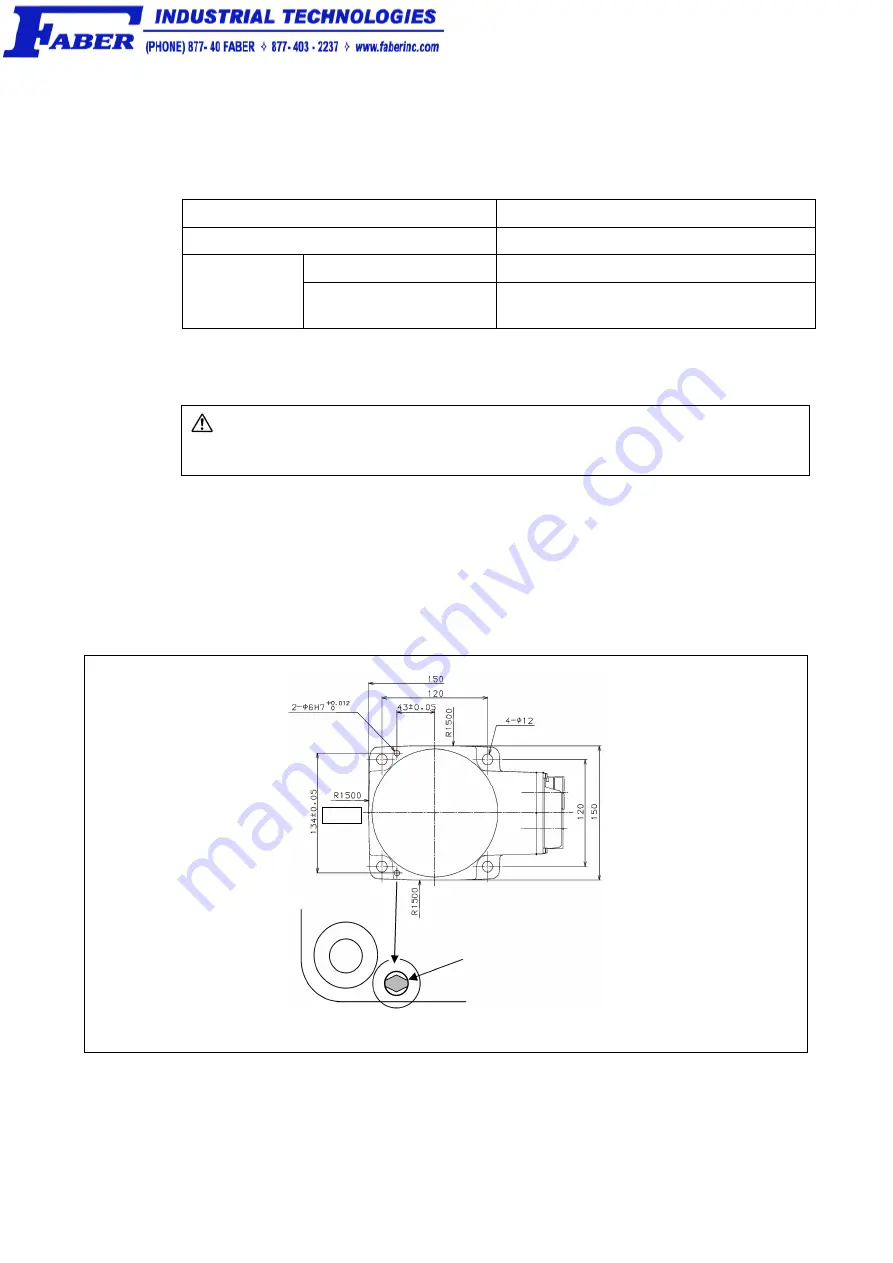
(1) According to the dimensions specified in the figure below, drill four robot fixing holes
and two dowel pin holes in the robot mount where the robot unit is to be anchored.
Drilling in the robot mount
Drilling in the robot mount
For HS/HSS-G series
Four robot fixing holes
M10 bolt holes, a minimum of 20 mm deep
For diamond-shaped pin
4H7 dia. hole a minimum of 10 mm deep
Two holes for
dowel pins
For internally-threaded
positioning pin
6H7 dia. hole, a minimum of 10 mm deep
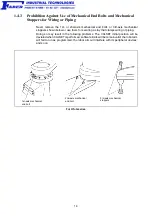
(2) Drive a diamond-shaped pin into the hole (HS/HSS-G: 4H7 dia.) so that the pin
becomes oriented as shown below.
(3) Drive an internally-threaded positioning pin into the hole (HS/HSS-G: 6H7 dia.).
Caution: Never skip this step. These dowel pins can minimize the risk of
misalignment that could be caused by replacement of the robot unit
during maintenance or due to vibration.
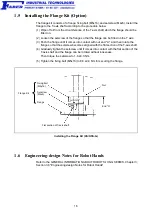
(4) Put the robot unit on the robot mount, following the transport instructions given in
Section 1.2.1 "Transporting the Floor-Mount Type" or Section 1.2.2 "Transporting the
Overhead-Mount Type."
(5) Secure the robot unit with four bolts and plain washers.
Fixing bolts: M10 x 30 mm, JIS strength class: 12.9 (For HS/HSS-G series)
Tightening torque: 70
14 Nm (For HS/HSS-G series)
(For HS/HSS-G series)
Bolt Positions for Securing the Robot Unit
Front
Diamond-shaped pin
Reference hole



































































