


























21
2.2
Modifying Software Motion Limits to Define New Motion
Space
2.2.1
What Is a Software Motion Limit?
A limit to the operation range of the robot defined by software is called a software
motion limit. Software motion limits become valid after CAL of the robot has been
completed and the robot has entered the range set by the limits.
A mechanical motion limit is called a mechanical end and set by a mechanical stop. To
prevent the robot from striking against a mechanical stop, each software motion limit is
set slightly in front of the mechanical end as shown below.
If the robot reaches a software motion limit during manual or automatic operation, an
error message will be displayed (error code starting from 607x where x represents the
axis number) and the robot will come to a stop. The power to the motor will be also
turned OFF if the robot is in automatic operation.
Each of all axes is assigned a software motion limit in both the positive and negative
direction of the operation range. The software motion limit in the positive direction is
called the positive-direction software motion limit and that in the negative direction is
called the negative-direction software motion limit.
Note: Software motion limits are not functions in accordance with safety
standards.
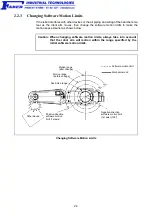
Software Motion Limits and Mechanical Ends
NLIM (Negative-direction
software motion limit)
PLIM (Positive-direction
software motion limit)
Software motion limit
Mechanical end
Motion range
Restricted range







































































