

























24
2.2.3
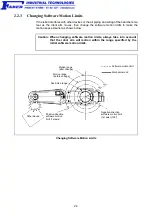
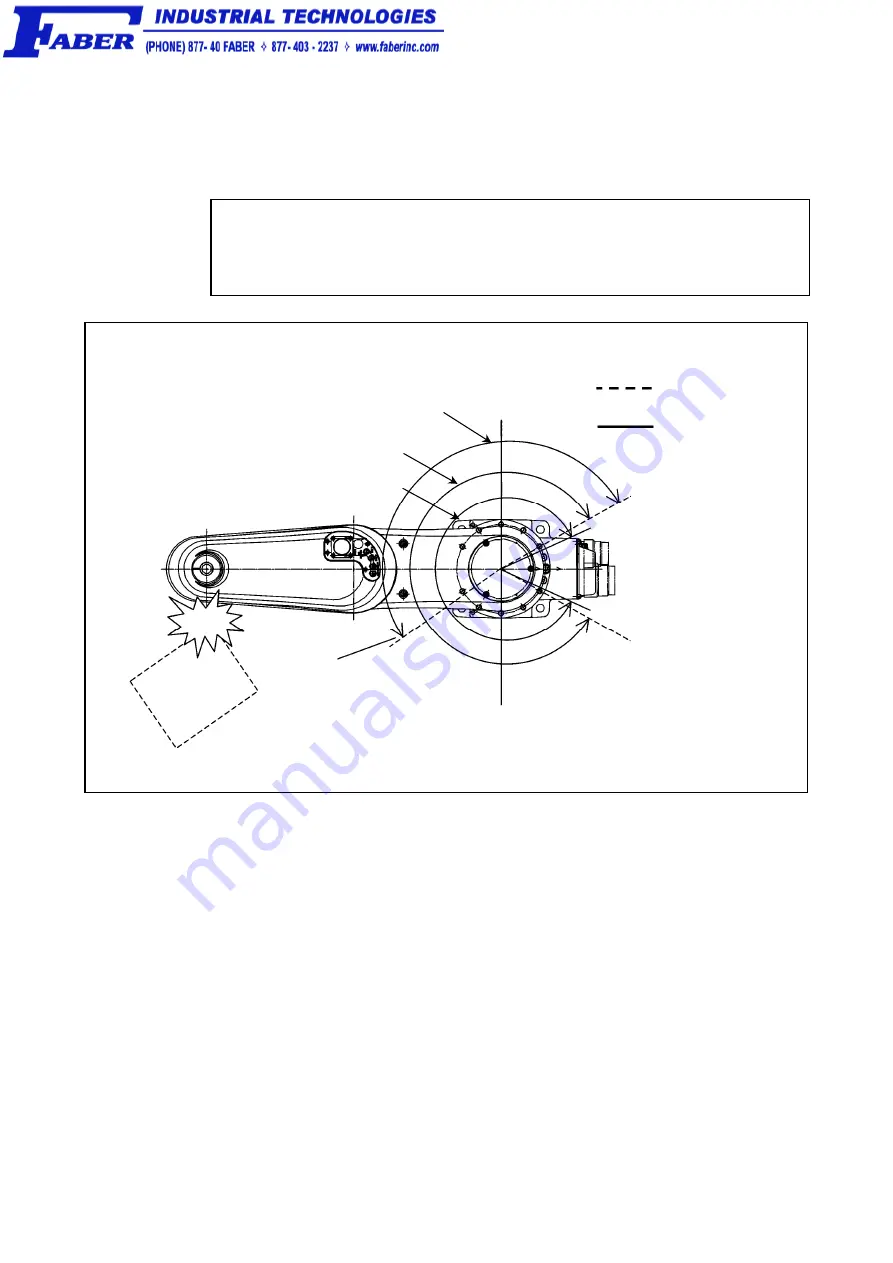
Changing Software Motion Limits
If the robot interferes with other devices or the air piping and wiring of the hand become
taut as the robot arm moves, then change the software motion limits to make the
motion space smaller as shown below.
Caution: When changing software motion limits, always take into account
that the robot arm will motion within the range specified by the
initial software motion limits.
Changing Software Motion Limits
Negative-direction
software motion limit
(1st axis) (155º)
Positive-direction
software motion
limit (1st axis)
Software motion limit
Mechanical end
Motion range
(before change)
Restricted range
Motion range
(after change)
Other device







































































