





























14
2.2 Modifying Software Motion Limits to Define New Motion
Space
2.2.1 What Is a Software Motion Limit?
A limit to the operation range of the robot defined by the software is called a software
motion limit. Software motion limits become valid after CAL of the robot has been
completed and the robot has entered the range set by the limits.
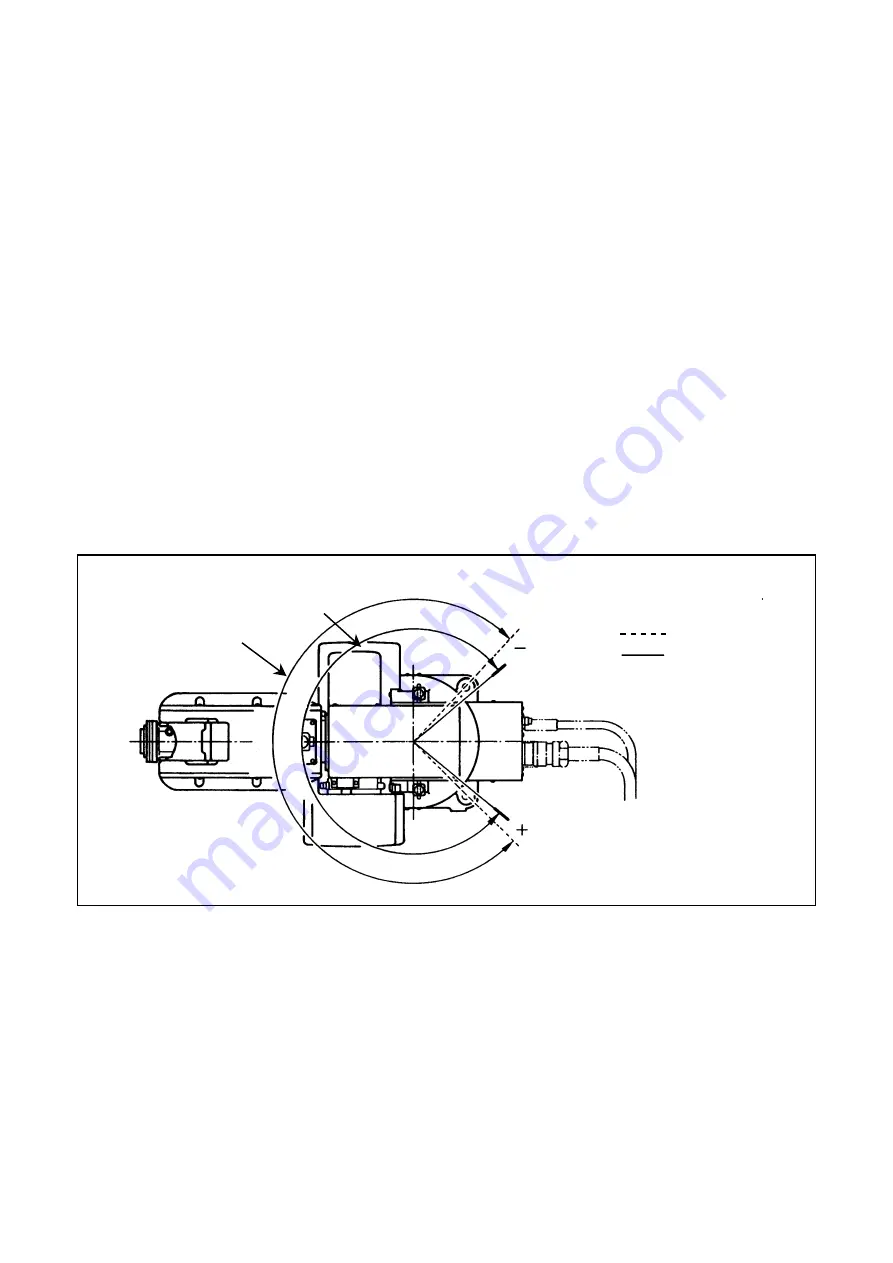
A mechanical operation limit is called a mechanical end and set by a mechanical stop.
To prevent the robot from striking against a mechanical stop, each software motion
limit is set slightly in front of the mechanical end as shown in the figure below. Although
there is no mechanical stop for the 6th axis, a software motion limit is set.
If the robot reaches a software motion limit during manual or automatic operation, an
error message will be displayed (error code starting from 6070; the first digit represents
the axis number) and the robot will come to a stop. The power to the motor is also
turned OFF in such a case during automatic operation.
All axes are assigned a software motion limit in both the positive and negative direction
of the operation range. The software motion limit in the positive direction is called the
positive-direction software motion limit and that in the negative direction is called the
negative-direction software motion limit.
Software Motion Limits and Mechanical Ends
NLIM (Negative-direction
software motion limit)
PLIM (Positive-direction
software motion limit)
Software motion limit
Mechanical end
Restricted range
Motion range
Summary of Contents for VS-6556G
Page 1: ...ROBOT Vertical articulated VS G SERIES INSTALLATION MAINTENANCE GUIDE...
Page 6: ......
Page 67: ...49 Reference Drawing of Part A Material A2017 T4...
Page 68: ...50 Reference Drawing of Part B Material A2017 T4 Reference Drawing of Part C Material A2017 T4...
Page 71: ...53 Reference Drawing of Stay for 3rd axis Mechanical End VS6556G Material A2017 T4...
Page 118: ......
Page 120: ......







































































