




























30
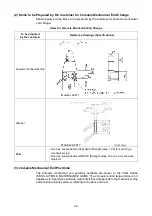
(3) Changing positive-direction software motion limits (PLIMs) and RANG values
The set positive-direction software motion limits (PLIMs) and RANG values must be
changed whenever the positive-direction mechanical ends are changed.
Note:
If the following case, the RANG values change and the CALSET are necessary after
a mechanical end change.
If you perform the CALSET for the robot with the mechanical stop parts
prepared by you when the CALSET becomes necessary (Example: Exchanging
the motor).
In this case, the position repeatability is depended on the mechanical stop parts
prepared by you.
And also you need to note down the new RANG values and CALSET values.
The initial RANG values and CALSET values at the time of delivery from the plant are
saved in the initialization floppy disk.
Change the set positive-direction software motion limits (PLIMs) and RANG values
according to steps 1 through 24 described below.
Changing Positive-Direction Software Motion Limits (PLIMs)
STEP 1
Turn the power switch of the robot controller to ON.
STEP 2
Set the mode selector switch of the teach pendant to MANUAL.
STEP 3
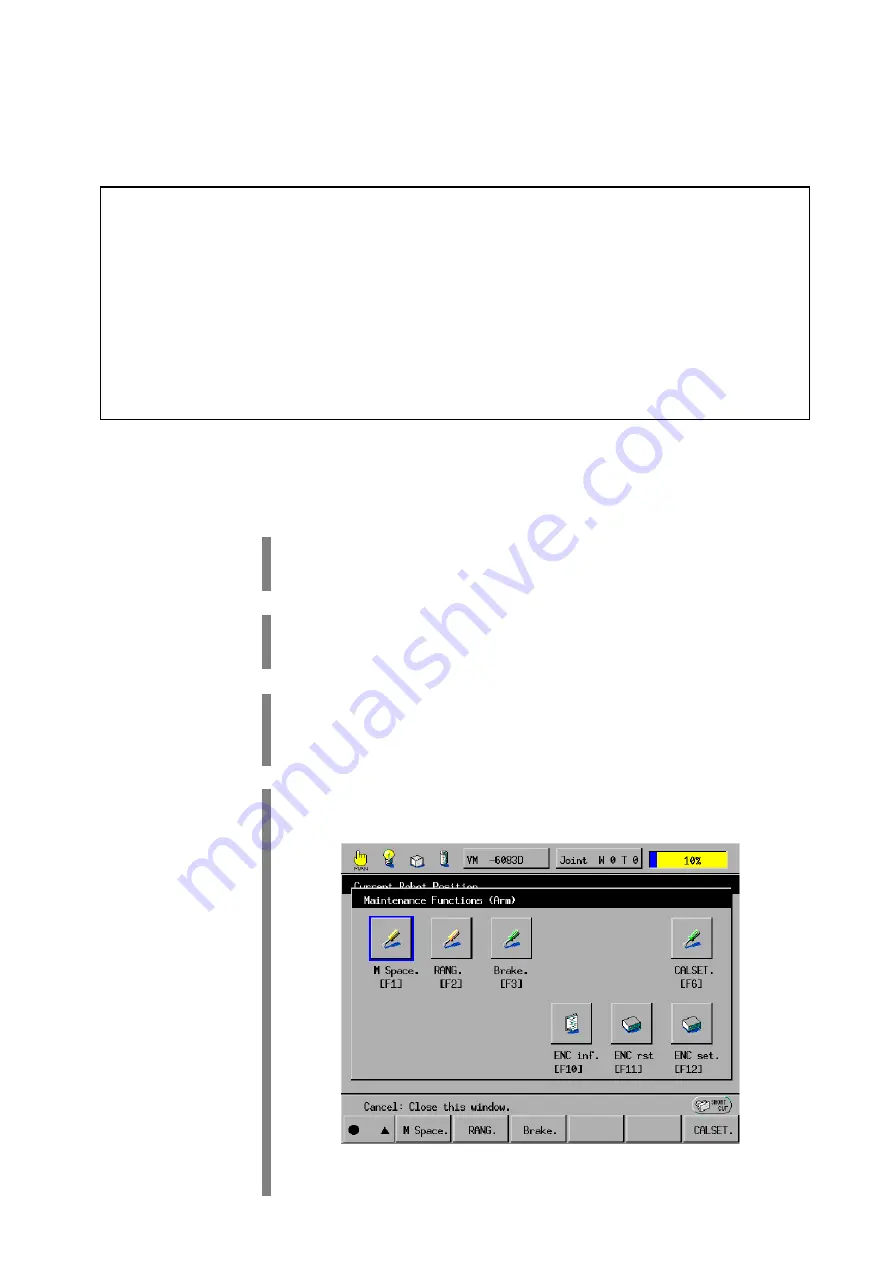
Press [F2 Arm] on the top screen.
The Current Robot Position window appears.
STEP 4
Press [F12 Aux.].
The Maintenance Functions (Arm) window appears.
F1
Summary of Contents for VS-6556G
Page 1: ...ROBOT Vertical articulated VS G SERIES INSTALLATION MAINTENANCE GUIDE...
Page 6: ......
Page 67: ...49 Reference Drawing of Part A Material A2017 T4...
Page 68: ...50 Reference Drawing of Part B Material A2017 T4 Reference Drawing of Part C Material A2017 T4...
Page 71: ...53 Reference Drawing of Stay for 3rd axis Mechanical End VS6556G Material A2017 T4...
Page 118: ......
Page 120: ......






































































