


























47
[ 4 ] Mechanical End Change for Robot Unit Having No Dedicated Internal
Threads
For robot units having no internal threads dedicated to mechanical end change, use
undedicated internal threads as shown below.
The 2nd-axis mechanical stops for the VS-6556G and VS-6577G are of the same
shape, so the description of mechanical end change in [4-1] is common to both
models.
The 3rd-axis mechanical stops for the VS-6556G and VS-6577G are of different
shapes, so the descriptions are separately provided for each model, [4-2] for
VS-6556G and [4-3] for the VS-6577G.
[4-1]
2nd-axis Mechanical End Change (Common to VS-6566G and VS-6577G)
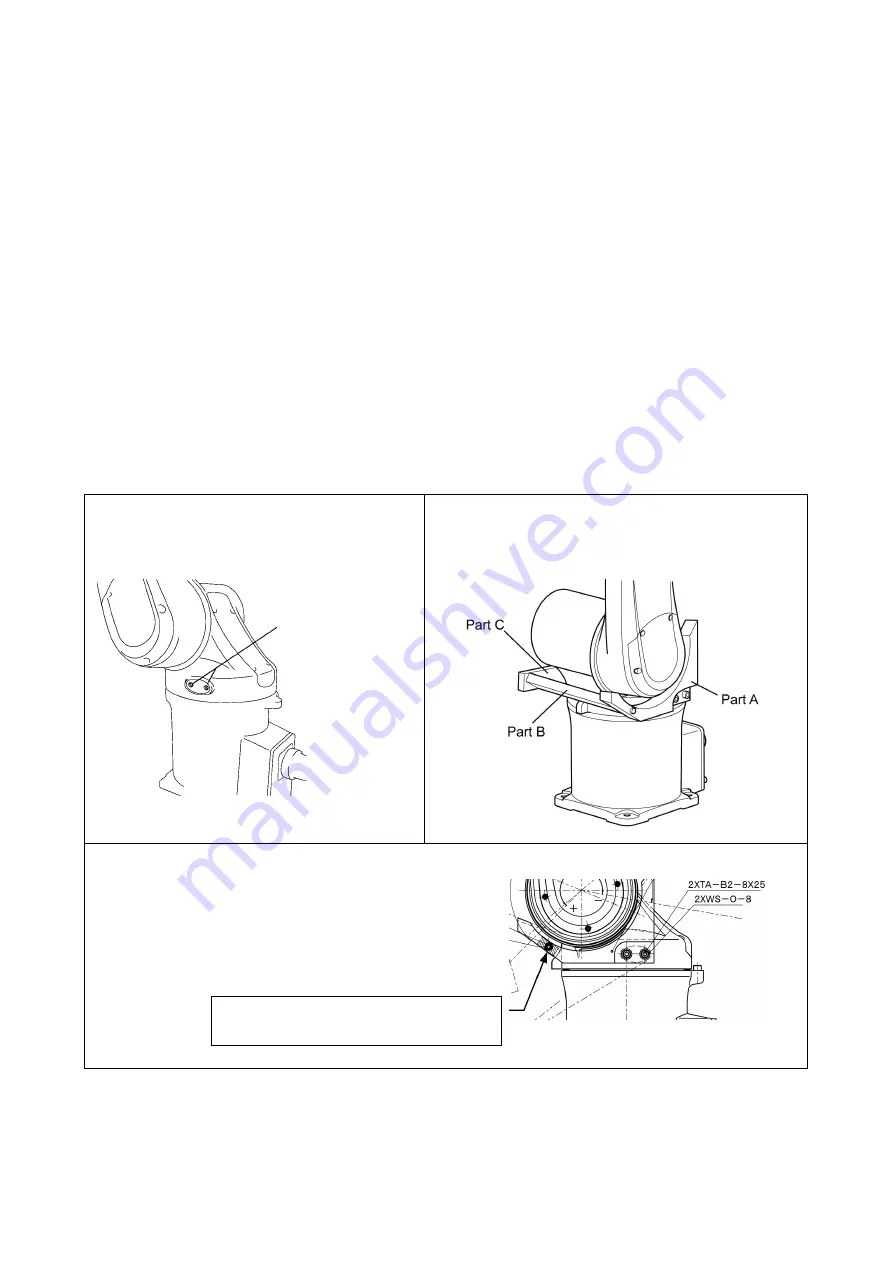
(1) Outline
The 2nd-axis mechanical end can be changed by mounting a mechanical stop to the
undedicated internal threads as shown below. The mechanical stop consists of three
parts--Part A, Part B, and Part C. The mechanical stop and the related parts should be
prepared by the customer.
Example of 2nd-axis Mechanical End Configured on the Robot Unit
Positions of Undedicated Internal Threads
(to be used for 2nd-axis mechanical end change)
Example of 2nd-axis Mechanical End
Configured on the Robot Unit
Note for mounting Part B
This face of Part A and that of Part B should
be parallel with each other.
2 undedicated
internal threads
Summary of Contents for VS-6556G
Page 1: ...ROBOT Vertical articulated VS G SERIES INSTALLATION MAINTENANCE GUIDE...
Page 6: ......
Page 67: ...49 Reference Drawing of Part A Material A2017 T4...
Page 68: ...50 Reference Drawing of Part B Material A2017 T4 Reference Drawing of Part C Material A2017 T4...
Page 71: ...53 Reference Drawing of Stay for 3rd axis Mechanical End VS6556G Material A2017 T4...
Page 118: ......
Page 120: ......







































































