




























76
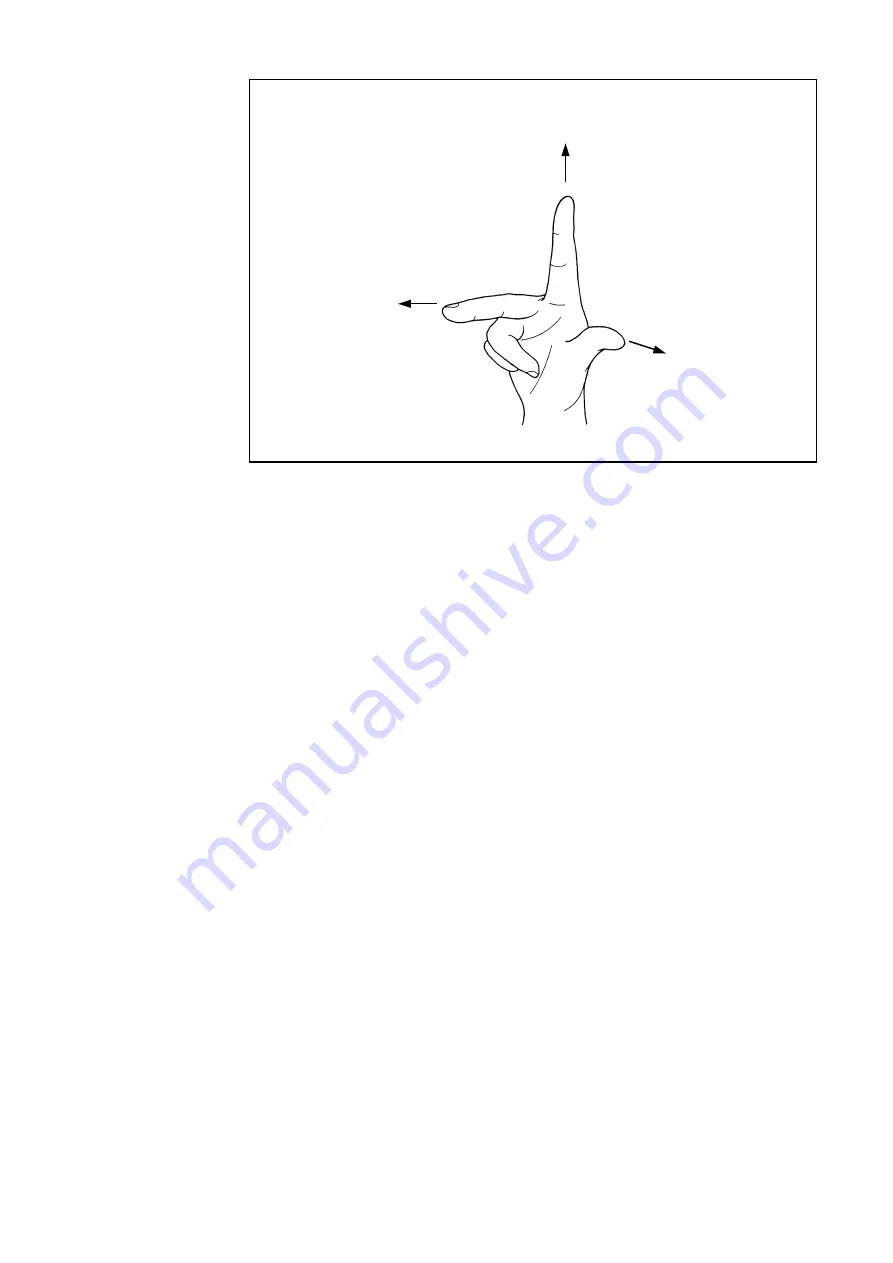
Right Hand Coordinate System
2.6 Setting Robot Installation Conditions
The optimum operating conditions will differ depending on whether the robot is
floor-mounted or overhead-mounted.
When the robot leaves the factory, it is set for floor-mount. If you overhead-mount your
robot, you need to change the installation settings.
For the setting procedure, refer to the SETTING-UP MANUAL, Section 2.10, "Setting
the Robot Installation Condition" and the PROGRAMMER'S MANUAL, Section 4.7.3
"Setting Robot Installation Conditions."
Z-axis positive direction
(approach vector)
Y-axis positive direction (orientation vector)
X-axis positive direction
(normal vector)
Summary of Contents for VS-6556G
Page 1: ...ROBOT Vertical articulated VS G SERIES INSTALLATION MAINTENANCE GUIDE...
Page 6: ......
Page 67: ...49 Reference Drawing of Part A Material A2017 T4...
Page 68: ...50 Reference Drawing of Part B Material A2017 T4 Reference Drawing of Part C Material A2017 T4...
Page 71: ...53 Reference Drawing of Stay for 3rd axis Mechanical End VS6556G Material A2017 T4...
Page 118: ......
Page 120: ......

































































