





























2.3.
principes de fonctionnement
-
Le Balance Scooter utilise l’équilibre dynamique, avec un gyroscope interne et des capteurs
d’accélération. L’état su scooter est contrôlé par le centre de gravité. Il est ajusté par un moteur lui-
même contrôlé par le système de servo-contrôle. Quand vous vous penchez en avant, il ressent votre
action et accélère. Quand vous devez tourner, ralentissez et bougez votre pied en avant ou en arrière,
le centre de gravité du corps se déplace vers la gauche ou la droite, et donc le scooter capte le
mouvement vers la gauche ou la droite.
-
Le Balance Scooter a un système de stabilisation dynamique à inertie, il peut donc maintenir un
équilibre avant-arrière, mais pas la gauche ou la droite. Donc pour tourner, le scooter a besoin d’être
mis en fonction doucement, sinon vous pourriez vous blesser.
2.4.
Apprendre à l’utiliser
Étape 1 : Appuyer sur le bouton Marche pour faire fonctionner le scooter.
Étape 2 : Mettre le scooter sur un terrain plat et s’assurer que toutes les mesures de sécurité sont prises.
Mettre un pied sur la planche déclenche l’interrupteur de pédale pour allumer l’indicateur d’opération, après
le système entre en mode d’auto-équilibre, mettre l’autre pied sur la planche.
Étape 3 : Prendre le contrôle avant-arrière du scooter, rappelez-vous que le mouvement de votre corps ne
doit être brusque.
Si vous n’êtes pas en équilibre quand vous déclenchez l’interrupteur à pied, le buzzer retentit et la LED
d’avertissement s’allume. Le système n’est pas en équilibre. Si le système n’est pas en équilibre, vous ne
devez pas utiliser le scooter. Vous devez étalonner les capteurs, voir le paragraphe 2.2.
Étape 4 : Contrôler la direction à gauche ou à droite du scooter.
Étape 5 : Avant de partir, vérifier que le scooter est toujours en équilibre et arrêté, puis vous pouvez poser
un pied puis l’autre.
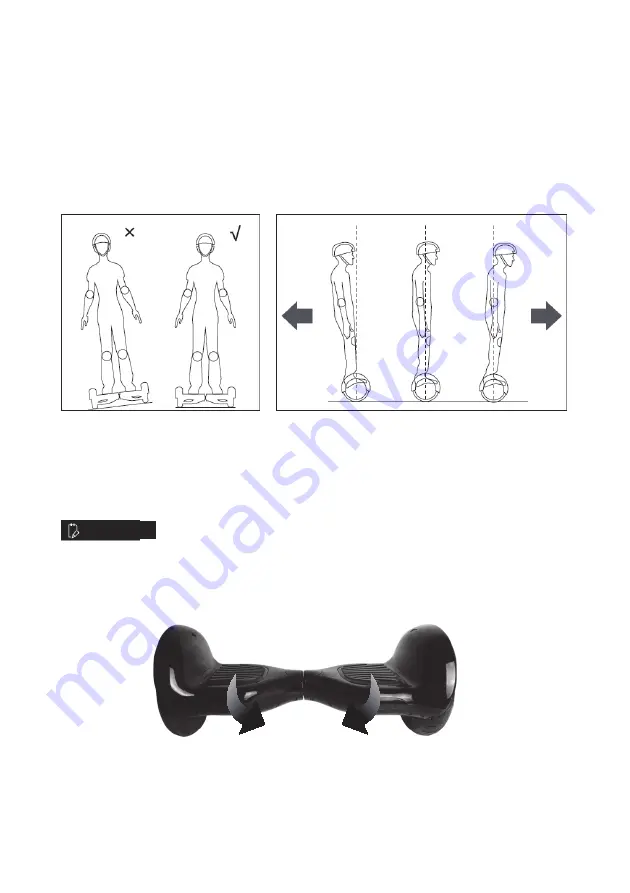
Inclinez votre pied droit vers l’avant
pour tourner à gauche
Inclinez votre pied gauche vers
l’avant pour tourner à droite
REMARQUE :
FRA 2























































