





















2.3.
Operating principal
-
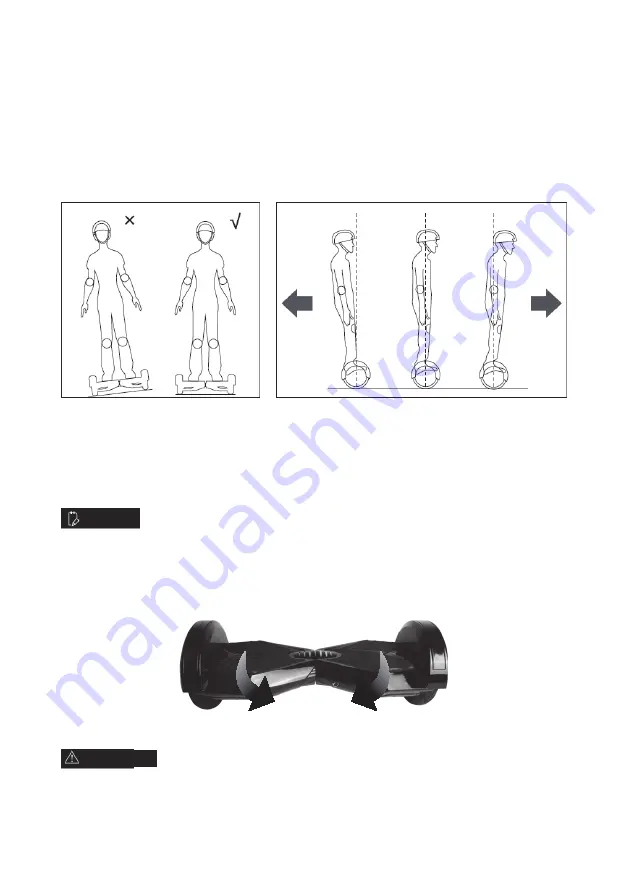
Balancing scooter uses Dynamic equilibrium, using internal gyroscope and acceleration sensors. The
status of the scooter is controlled by the center-of gravity. It is adjusted by motor, which is controlled by
the servo control system. When you lean forward, it will sense your actions to accelerate. When you
need to turn, slow it down and move your foot forwards or backwards then the center-of gravity of the
body moves left or right therefore the scooter can sense moving left or right.
-
Balance scooter has inertial dynamic stabilization system, so it can keep anterior-posterior balance but
cannot guarantee the left and right. So when turning, the scooter needs to be operated slowing,
otherwise, you may be injured.
2.4.
Learn how to use it
Step 1: Press the power button to turn on the scooter.
Step 2: Put the scooter on a flat ground and make sure all safety measures are taken. Put one foot on the
pad that will trigger the pedal switch to turn on the operation indicator, after the system enters the self-
balancing mode, put the other foot on the pad.
Step 3: Take control of the scooters’ forwards or backwards, do remember the movement of your body
should not be abrupt.
If you are not in a balanced condition when you trigger the foot-switch, the buzzer will alarm, and the warning
LED will light. The system is not in a self-balanced condition. Without a balanced condition, you should not
operate the scooter. Then you need to calibrate the sensors, see point 2.2.
Step 4: Control the left and right direction of the scooter.
Step 5: Before you get off, make sure that the scooter is still in balanced condition and stopped, then step off
one foot, then the other foot.
Tilt right foot forward- Turn Left
Tilt left foot forward- Turn Right
You should never turn violently when driving fast.
NOTE:
WARNING!
ENG 2






















































