





















KX-2 Robot
–
User’s Manual
Peak Robotics, Inc.
4747 Centennial Blvd; Colorado Springs, CO 80919
Ph 719.598.3555,
Printed: 3/3/2021
Page
7
4.0 Compliance with Standards
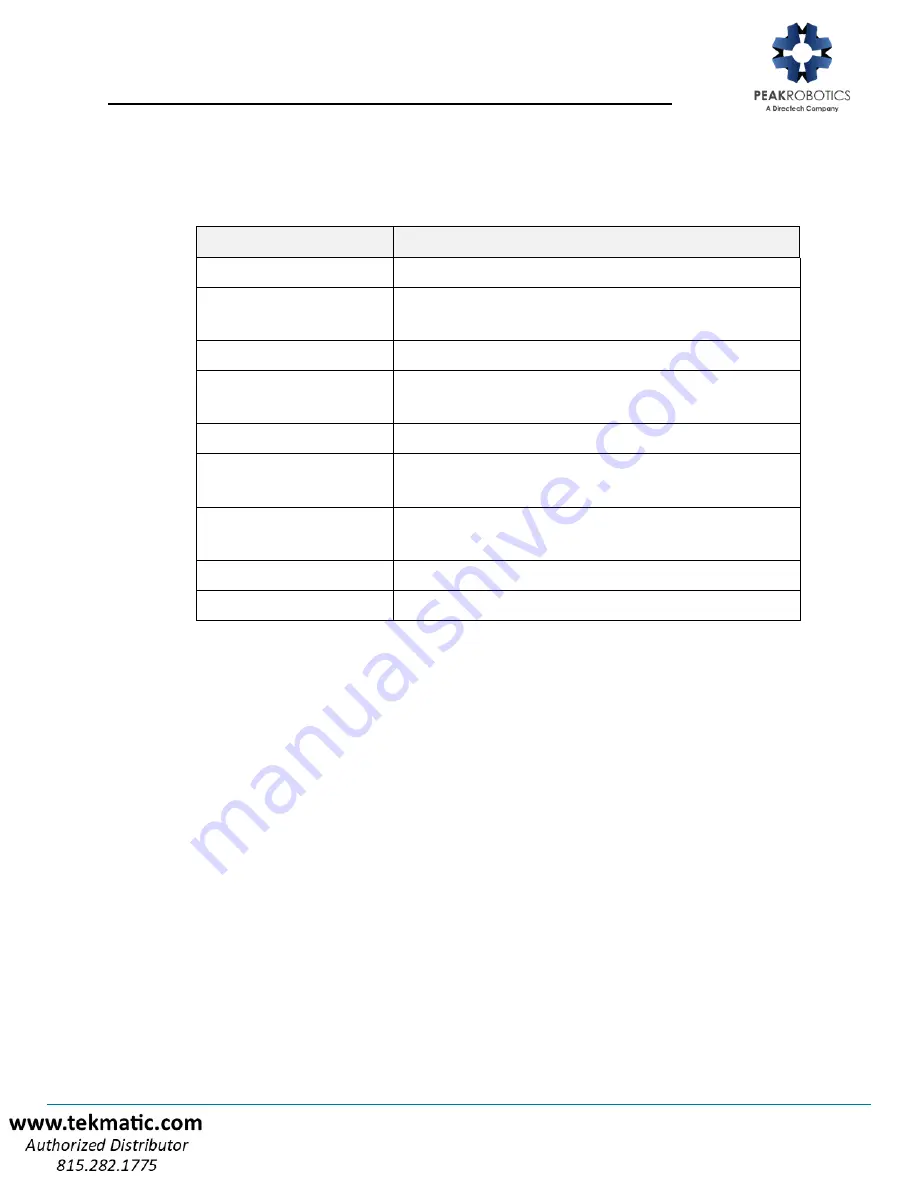
4.1 The KX-2 robot complies with the following standards:
Standard
Description
CISPR11/FCC Class B
Emission Standard for Industrial Environments (EMC)
EMC Directive 2014/30/EU IEC 61326-1:2012, Electrical Equipment for Measurement,
Control and Laboratory Use (EMC)
IEC 61010-1:2016
Safety Requirements for Laboratory Equipment
ISO 10218-1:2011
Robots and Robotic Devices
—Safety Requirements for
Industrial Robots, Part 1: Robots
ISO/TS 15066
Robots and Robotic Devices
—Collaborative Robots
ISO 13849-1:2015
Safety of Machinery
—Safety-related Parts of Control
Systems, Part 1: General Principles for Design
ISO 13849-2:2012
Safety of Machinery
—Safety-related Parts of Control
Systems, Part 2: Validation
2011/65/EU
RoHS2
—Restriction of Hazardous Substances
2006/42/EC
Machinery Directive (CE)
4.2 Clause 5.8.4 of ISO 10218:1-2011 states that the pendant or teaching control device shall have
an emergency stop function. A PC application or a game controller can be used to teach the KX-
2 robot. These controls do not have an integrated emergency stop function. Peak Robotics has
made the determination that an integrated emergency stop function is not necessary due to
compliance of the robot with ISO/TS 15066.
4.3 Clause 5.7.1 of ISO 10218:1-2011 states that operational modes shall be selectable with a mode
selector. The KX-2 robot does not have a mode selector. Peak Robotics has made the
determination that a mode selector is not necessary due to compliance with ISO/TS 15066.
4.4 Clause 5.6 of ISO 10218:1-2011 describes the requirements for speed control. Peak Robotics
has made the determination that speed control, as described in ISO 10218:1-2011 is not
necessary due to compliance with ISO/TS 15066. The speed of the KX-2 is controlled in the
following ways:
•
Each individual motor drive is programmed with a maximum speed limit for the attached
motor. The motor drive will disable the motor if the speed limit is exceeded.
•
The software is configured with individual motor speed limits as well as speed limits for
linear motion.
•
The power supply and motors are sized such that they are not physically capable of
attaining speeds that are significantly higher than the limits imposed by the motor drives
and software.
Summary of Contents for PEAKROBOTICS KX-2
Page 2: ......







































































