











26
UH 5947 / 25.03.19 en / 091A
Installing the measuring sensors
Cross faults between measuring sensors must be excluded by an appropriate cable installation.
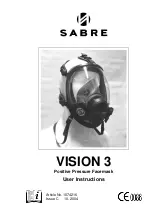
Gear ratio or shaft break monitoring
For certain applications, it may be necessary to set a gear ratio. To this end, the following arrangement of proximity sensors or encoder is required:
It has to be taken into account that the rotational speed to be monitored on encoder or proximity sensor 1 (E1) must always larger than or equal to
the rotational speed to be monitored on proximity sensor 2 (E2). The set speed limits on the display for a set gear ratio always refer to the encoder or
proximity sensor 1 (E1).
In the case that the gear arranged between E1 and E2 has no integer gear ratio, a corresponding adjustment is possible by a modification of the reso-
lution settings for E1/E2 (pulses/rev. or mm).
M10287
Gearwheel
Gearwheel
Shaft
Gear
ü = x / 1
Motor
z.B.: = 1500 rpm ;
1
2
= 300 rpm
Input on the display ü = 5:1
n n
n
n
n
n
n
n
n
n
n
1500 rpm
300 rpm
1
2
ü
=
=
= 5
Transmission ratio
ü = /
= x / 1
1
2
1
2
Encoder( )
1
Initiator( )
2
Initiator( )
1
E2
E1
This arrangement is also used to detect a shaft break. Taking the gear ratio into account, when the measured signals between sensor on the motor and
sensor on the shaft do not correspond, the device immediately switches to a safe failure condition.
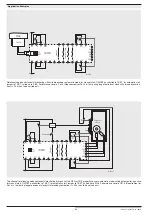
Monitored movement: rotational; sensor type: rotationally
M10288
Gearwheel with
4 tooth
1mm
Gear
Encoder with
512 lines
Gearwheel with
16 tooth
Initiator E2
(Drop A, B, C, E)
Initiator E2
(Drop F)
Spindle with
thread pitch 10mm/U
Slide
Initiator E1
(Drop B)
Initiator E1
(Drop A)
50:1
Motor
Settings on the display based on the above example:
Case A:
Sensor selection:
E1+E2
Proximity sensor resolution E1: 16 pulses/rev.
Proximity sensor resolution E2: 4 pulses/rev.
Gear ratio:
50:1
The speed limits (rpm) to be set refer to the rotational speed on proximity
sensor E1.
Case B:
Sensor selection:
E1+E2
Proximity sensor resolution E1: 4 pulses/rev.
Proximity sensor resolution E2: 4 pulses/rev.
Gear ratio:
1:1 (as measuring is on the same location)
The speed limits (rpm) to be set refer to the rotational speed on proximity
sensor E1.
Case C:
Sensor selection:
E2
Encoder resolution:
512 pulses/rev.
Proximity sensor resolution E2: 4 pulses/rev.
Gear ratio:
50:1
The speed limits (rpm) to be set refer to the rotational speed on the
encoder.
Case D:
Sensor selection:
Encoder
Encoder resolution:
512 pulses/rev.
Gear ratio:
Not relevant as only one sensor is
selected.
The speed limits (rpm) to be set refer to the rotational speed on the
encoder.
Case E: Monitoring of the cradle for 3m/min, for example
Sensor selection:
E2
Encoder resolution:
512 pulses/rev.
Proximity sensor resolution E2: 4 pulses/rev.
Gear ratio:
50:1
The rotational speed limits (rpm) to be set refer to the rotational speed
on the encoder. Therefore, to monitor the cradle as shown, at first the
translational movement has to be converted in a corresponding rotational
movement. This is done as follows:
Rotational
monitoring limit
=
Translational monitoring limit x gear ratio
Pitch
=
3 m/min x 50
10 mm/U
= 15000 U/min
Case F: Monitoring of the cradle for 3m/min, for example
Sensor selection:
E2
Encoder resolution:
512 pulses/rev.
Proximity sensor resolution E2: 10 pulses/rev. (1 mm/pulse)
Gear ratio:
50:1
The rotational speed limits (rpm) to be set refer to the rotational speed
on the encoder. Therefore, to monitor the cradle as shown, at first the
translational movement has to be converted in a corresponding rotational
movement. The resolution of the proximity sensor E2 has to be calculated
too. This is done as follows:
Rotational
prox. sens resolution E2
=
Pitch
Translational proximity sensor resolution E2
=
10 mm/U
1 mm/Imp.
= 10 Imp./U
Rotational
monitoring limit
=
Translational monitoring limit x gear ratio
Pitch
=
3 m/min x 50
10 mm/U
= 15000 U/min
Notes for Configuration
Configuration Examples
Summary of Contents for SAFEMASTER S UH 5947
Page 4: ...4 UH 5947 25 03 19 de 091A ...
Page 20: ...20 UH 5947 25 03 19 en 091A ...
Page 36: ...36 UH 5947 25 03 19 fr 091A ...