


























42
UH 5947 / 25.03.19 fr / 091A
Montage des capteurs de mesure
Les court-circuits transversaux entre les capteurs de mesure doivent être exclus en posant les conducteurs d‘une façon appropriée.
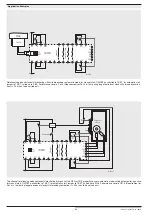
Rapport de transmission et surveillance de rupture d‘arbre
Pour certaines applications, il peut s‘avérer nécessaire de régler un rapport de transmission. A cet effet, la disposition suivante des détecteurs ou de
l‘encodeur est nécessaire :
Il convient de tenir compte du fait que la vitesse de rotation de l‘encodeur ou du détecteur 1 (E1) à surveiller doit toujours être égale ou supérieure à la
vitesse de rotation du détecteur 2 (E2). Les limites de vitesse de rotation réglées sur l‘écran se réfèrent toujours à l‘encodeur ou au détecteur 1 (E1) à
un rapport de transmission réglable donné.
Lorsque la transmission intercalée entre E1 et E2 ne présente pas un rapport de transmission en nombres entiers, il est possible d‘effectuer l‘adaptation
correspondante en modifiant les réglages de résolution E1/E2 (imp./U ou mm).
M10434
roue dentée
roue dentée
axe
transmission
ü = x / 1
moteur
par ex. : = 1500 U/min ;
1
2
= 300 U/min
affichage ü = 5:1
n
n
n
n
n
n
n
n
n
n
n
1500 U/min
300 U/min
1
2
ü
=
=
= 5
rapport de transmission:
ü = /
= x / 1
1
2
1
2
encodeur( )
1
initiateur( )
2
initiateur( )
1
E2
E1
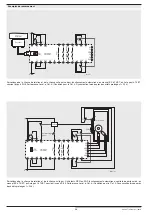
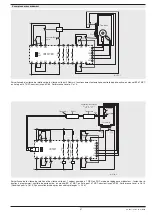
Cette disposition est également destinée à la détection d‘une rupture d‘arbre. Lorsque les signaux de mesure du capteur de mesure du moteur ne
correspondent pas à ceux de l‘arbre en fonction du rapport de transmission, l‘appareil se met immédiatement dans un état d‘erreur de sécurité.
Mouvement surveillé : rotatif ; type de capteur : rotatif
M10435
roue dentée à
4 dents
1mm
transmission
encodeur à
512 traits
roue denée à
16 dents
initiateur E2
(cas A, B, C, E)
initiateur E2
(cas F)
vis sans fin
pas 10mm/U
traîneau
initiateur E1
(cas B)
initiateur E1
(cas A)
50:1
moteur
Réglages d‘écran par rapport à l‘exemple démontré plus haut:
Cas A:
Choix du capteur:
E1+E2
Résolution du détecteur E1:
16 Imp./U
Résolution du détecteur E2:
4 Imp./U
Rapport de transmission:
50:1
Les limites de vitesse de rotation à régler (t/min) se réfèrent à la vitesse
de rotation au détecteur E1.
Cas B:
Choix du capteur:
E1+E2
Résolution du détecteur E1:
4 Imp./U
Résolution du détecteur E2:
4 Imp./U
Rapport de transmission:
1:1 (da an gleicher Stelle gemessen wird)
Les limites de vitesse de rotation à régler (t/min) se réfèrent à la vitesse
de rotation au détecteur E1.
Cas C:
Choix du capteur:
EE2
Résolution de l‘encodeur:
512 Imp./U
Résolution du détecteur E2:
4 Imp./U
Rapport de transmission:
50:1
Les limites de vitesse de rotation à régler (t/min) se réfèrent à la vitesse
de rotation à l‘encodeur.
Cas D:
Choix du capteur:
Encodeur
Résolution de l‘encodeur:
512 Imp./U
Rapport de transmission:
ne s‘applique pas, un seul capteur étant
sélectionné
Les limites de vitesse de rotation à régler (t/min) se réfèrent à la vitesse
de rotation à l‘encodeur.
Cas E: Surveillance du chariot sur 3 m/min par ex. 3 m/min.
Choix du capteur:
EE2
Résolution de l‘encodeur:
512 Imp./U
Résolution du détecteur E2:
4 Imp./U
Rapport de transmission:
50:1
Les limites de vitesse de rotation à régler (t/min) se réfèrent à la vitesse
de rotation à l‘encodeur, c‘est pourquoi le mouvement translatoire doit
d‘abord être converti en un mouvement rotatif correspondant afin de sur-
veiller le chariot conformément à l‘image. La procédure à appliquer est la
suivante:
limite de
surveillance rotative
=
limite de surveillance translatoire x rapport de transmission
pente
=
3 m/min x 50
10 mm/U
= 15000 U/min
Cas F: Surveillance du chariot sur 3 m/min par ex. 3 m/min.
Choix du capteur:
EE2
Résolution de l‘encodeur:
512 Imp./U
Résolution du détecteur E2:
10 Imp./U (1 mm/Imp.)
Rapport de transmission:
50:1
Les limites de vitesse de rotation à régler (t/min) se réfèrent à la vites-
se de rotation à l‘encodeur c‘est pourquoi le mouvement translatoire doit
d‘abord être converti en un mouvement rotatif correspondant afin de sur-
veiller le chariot conformément à l‘image. La résolution du détecteur E2
doit également être calculée. Ce calcul s‘effectue de la manière suivante:
résolution rotative
du détecteur E2
=
pente
résolution translatoire du détecteur E2
=
10 mm/U
1 mm/Imp.
= 10 Imp./U
limite de
surveillance rotative
=
limite de surveillance translatoire x rapport de transmission
pente
=
3 m/min x 50
10 mm/U
= 15000 U/min
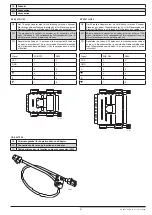
Recommandations de configuration
Exemples de configuration
Summary of Contents for SAFEMASTER S UH 5947
Page 4: ...4 UH 5947 25 03 19 de 091A ...
Page 20: ...20 UH 5947 25 03 19 en 091A ...
Page 36: ...36 UH 5947 25 03 19 fr 091A ...







































































