





















Doosan Robotics User Manual v2.6.1
246
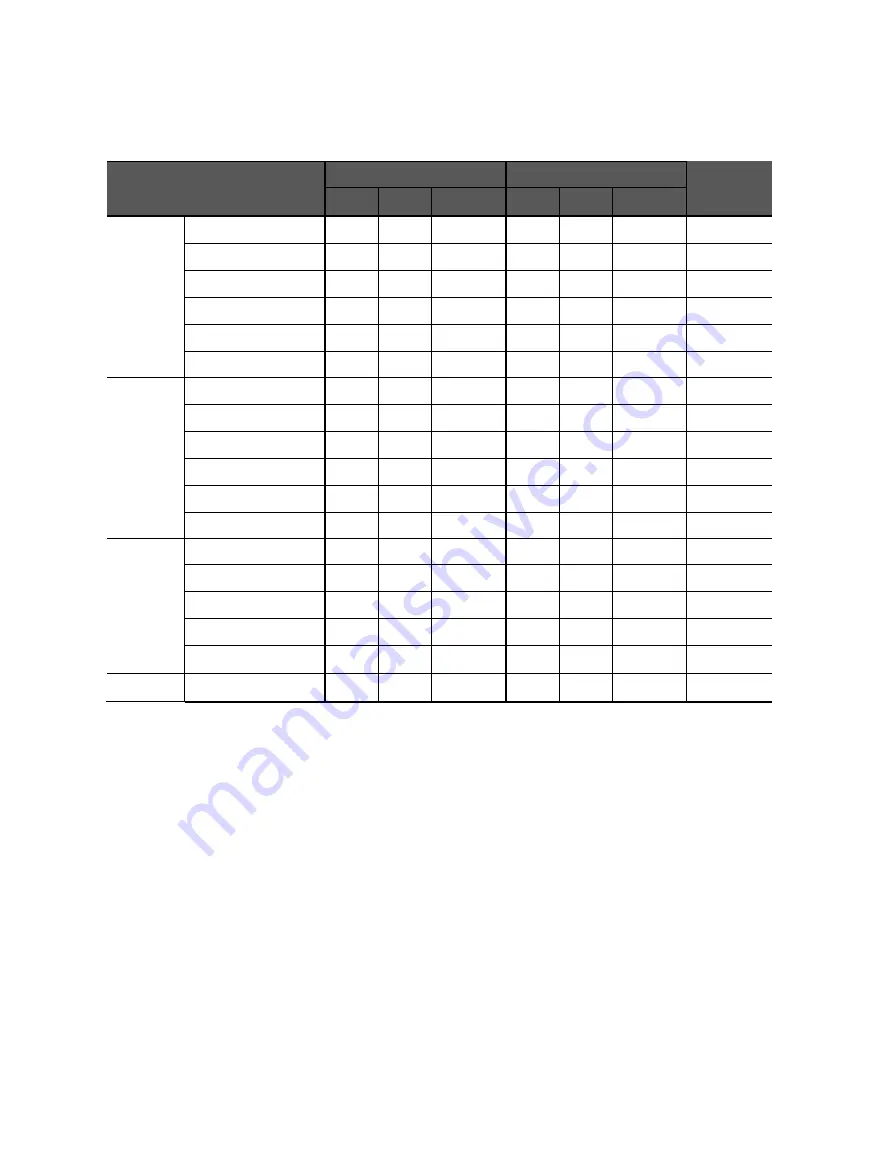
A.5 A0509, A0509S
Parameters
Normal
Reduced
Tolerance
(+/-)
Min
Max
Default
Min
Max
Default
Joint
Angle
Limits
J1 (degree)
-360
360
-360~360
-360
360
-360~360
3/-3
J2 (degree)
-360
360
-95~95
-360
360
-95~95
3/-3
J3 (degree)
-160
160
-135~135
-160
160
-135~135
3/-3
J4 (degree)
-360
360
-360~360
-360
360
-360~360
3/-3
J5 (degree)
-360
360
-135~135
-360
360
-135~135
3/-3
J6 (degree)
-360
360
-360~360
-360
360
-360~360
3/-3
Joint
Speed
Limits
J1 (degree/s)
0
180
180
0
180
180
10
J2 (degree/s)
0
180
180
0
180
180
10
J3 (degree/s)
0
180
180
0
180
180
10
J4 (degree/s)
0
360
360
0
360
360
10
J5 (degree/s)
0
360
360
0
360
360
10
J6 (degree/s)
0
360
360
0
360
360
10
Robot/TCP
Limits
Force (N)
0
450
200
0
450
100
-
Power (W)
0
2000
600
0
2000
100
-
Speed (mm/s)
0
7000
2000
0
7000
1000
-
Momentum (kgm/s)
0
75
38
0
75
23
-
Collision Detection
Sensitivity (%)
1
100
75
-
-
-
-
Safety I/O
Speed Reduction
Ratio (%)
-
-
-
1
100
20
-
Summary of Contents for A0509
Page 1: ......
Page 214: ...Doosan Robotics User Manual v2 6 1 214 ...
Page 251: ...251 ...
Page 252: ...Doosan Robotics User Manual v2 6 1 252 ...
Page 253: ...253 ...







































































