





























91
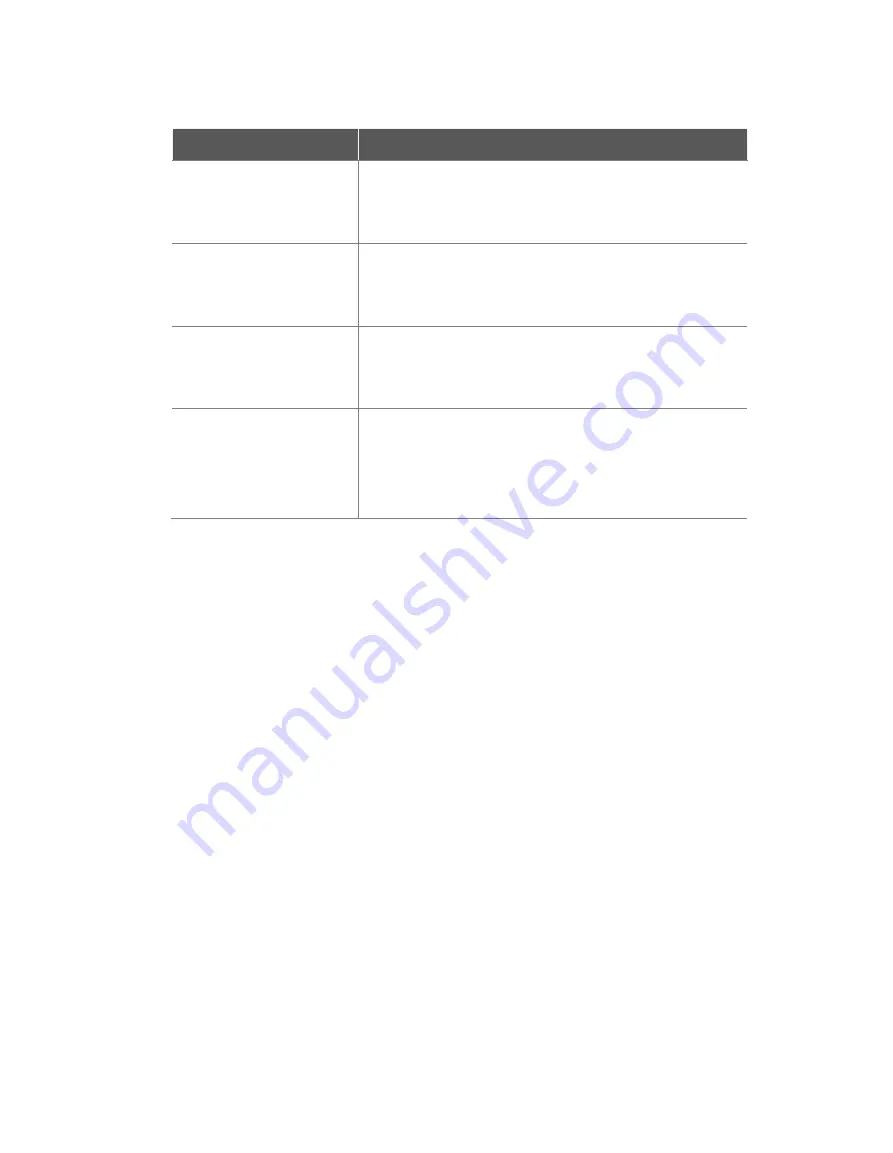
Signal Name
Description
Robot In Motion (L)
This is used to notify the operator that the robot joint is
actually operating.
High:
The robot is stopped
Low:
The robot is operating
Mastering Alarm (L)
This is used to notify the operator that mastering is required
due to an issue in the home position setting.
High: The robot requires mastering
Low: The robot does not require mastering
Home Position (L)
This is used to confirm whether the robot is at the home
position.
High: The robot is at the home position
Low: The robot is not at the home position
Deceleration - SS1 SS2 (L)
This is used to check whether the robot is decelerating or not
during operation. In standby or normal operation, the signal
remains high. When deceleration starts, the signal changes to
Low, and when deceleration ends, the signal returns to High
again.
High
: Normal operation
Low
: Deceleration by SS1 or SS2 is occurred
Summary of Contents for A0509
Page 1: ......
Page 214: ...Doosan Robotics User Manual v2 6 1 214 ...
Page 251: ...251 ...
Page 252: ...Doosan Robotics User Manual v2 6 1 252 ...
Page 253: ...253 ...







































































