
























Copyright © 2001-2018, Dr Robot Inc. All Rights Reserved.
www.DrRobot.com
V.03.02.18.Q
- 18 -
If the robot is already on, please drive each joint carefully to “reset” position and press the “Start” button on
gamepad to set manipulator initial position, it will “check”
.
After that, you could press “B” button on gamepad to reset manipulator arm to initial position. This “reset”
process also will provide the motor protection based on mechanical limitation, so it should be mandatory.
When you operate the manipulator arm, please pay attention to the temperature sensor readings to avoid
overheating the motors
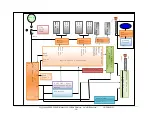
“Arm Driver1” tab will display motor driver controller
1 states (for Joint 1 and 2). If you did not get the
sensor reading back, you could click “QueryCmd”
button to send query command. Please make sure
the channel 1 and 2 are working in position control
mode (Mode:3).
will display channel1, 2 motor’s
current.
“Arm Driver2” tab will display motor driver 2 states
(for Joint3 and Gripper). If you did not get the sensor
reading back, you could click “QueryCmd” button to
send query command. Please make sure the channel
1 is working in position control mode (Mode:3) and
channel 2 is working in open loop mode.
will display channel 1 and 2
motor’s current.
“Arm Driver3” tab will display motor driver 3
state(for optional pan unit).
The two horizontal track bars show the Gamepad controller’s left and right stick control value.






































































