



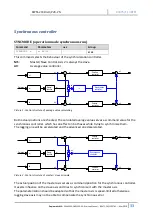

















EWM-2SS-DAD/22E-PN
89475/119 ETM
Duplomatic MS
▪
EWM-2SS-DAD/22E-PN Start-up Manual
–
89475-PN/119 ETM --- Mar 2019
43
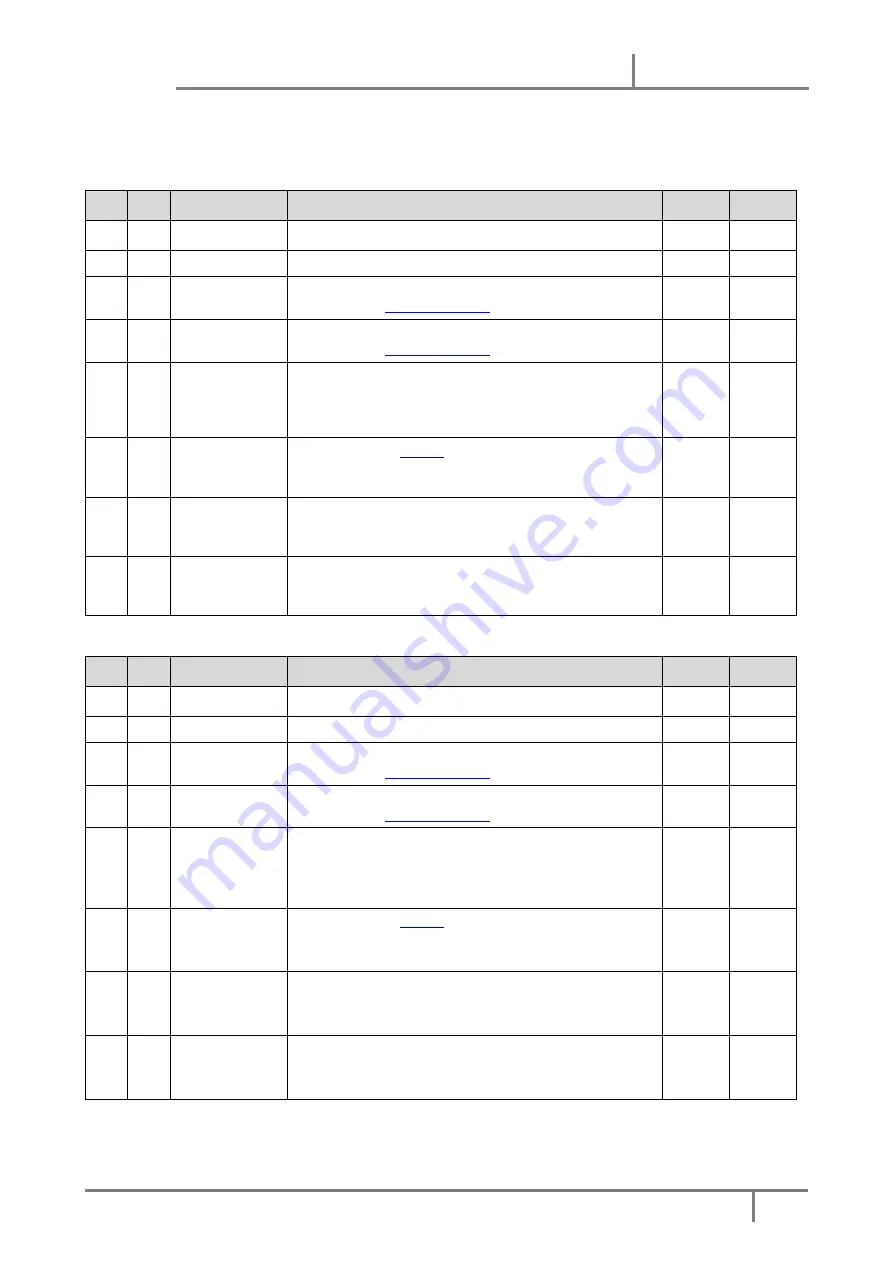
Description of the Control 1:
Nr.
Bit
Name
Description
Type
Default
1
0
-
-
BOOL
0
2
1
DC_Freeze_1
Storing of the drift compensation value as offset for the output.
BOOL
0
3
2
DC_Active_1
Drift compensation function
(look at chapter
BOOL
0
4
3
DC_F_Pos_1
Fine positioning function
(look at chapter
).
BOOL
0
5
4
Hand_B_1
Manual mode.
The axis is driven with the preset speed (parameter with the
same name). This mode can only be used if ENABLE is available
and the START comand is not set.
BOOL
0
6
5
Hand_A_1
Two parameters are available for this mode for example in order
to preparameterize manual driving in both directions
BOOL
0
7
6
Start_1
Start signal for positioning.
The actual transmitted position value is taken over and the
output will be controlled relating to the parameterization.
BOOL
0
8
7
Enable_1
General activation of the axis 1.
Malfunction monitoring and output signal get activated (in
combination with the hardware enable)
BOOL
0
Description of the Control_2 :
Nr.
Bit
Name
Description
Type
Default
1
0
-
-
BOOL
0
2
1
DC_Freeze_2
Storing of the drift compensation value as offset for the output.
BOOL
0
3
2
DC_Active_2
Drift compensation function
(look at chapter
BOOL
0
4
3
DC_F_Pos_2
Fine positioning function
(look at chapter
).
BOOL
0
5
4
Hand_B_2
Manual mode.
The axis is driven with the preset speed (parameter with the
same name). This mode can only be used if ENABLE is available
and the START comand is not set.
BOOL
0
6
5
Hand_A_2
Two parameters are available for this mode for example in order
to preparameterize manual driving in both directions
BOOL
0
7
6
Start_2
Start signal for positioning.
The actual transmitted command value is taken over and the
output will be controlled relating to the parameterization.
BOOL
0
8
7
Enable_2
General activation of the axis 2.
Malfunction monitoring and output signal get activated (in
combination with the hardware enable)
BOOL
0







































































