




















Start-up Manual
89475/119 ETM
8
Duplomatic MS S.p.A.
All rights reserved.
USE AND APPLICATION
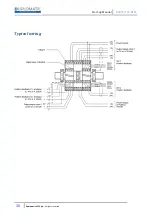
Installation instructions
This module is designed for installation in a shielded EMC housing (control cabinet). All cables
which lead outside must be screened; complete screening is required. It is also required that no d
strong electro-magnetic interference sources are installed nearby when using our control
modules.
Typical installation location: 24 V control signal area (close to PLC)
The devices must be arranged in the control cabinet so that the power section and the signal
section are separate from each other.
Experience shows that the installation space close to the PLC (24 V area) is most suitable.
All digital and analogue inputs and outputs are fitted with filters and surge protection in the
device.
The module should be installed and wired in accordance with the documentation bearing in mind
EMC principles. If other consumers are operated with the same power supply, a star-connected
ground wiring scheme is recommended. The following points must be observed when wiring:
•
The signal cables must be laid separately from power cables.
•
Analogue signal cables
must be shielded
.
•
All other cables must be screened if there are powerful interference sources (frequency
converters, power contactors) and cable lengths > 3 m. Inexpensive SMD ferrites can be used
with high-frequency radiation.
•
The screening should be connected to PE (PE terminal) as close to the module as possible. The
local requirements for screening must be considered in all cases. The screening should be
connected to at both ends. Equipotential bonding must be provided where there are
differences between the connected electrical components.
•
With longer lengths of cable (> 10 m), the diameters and screening measures should be
checked by specialists (e. g. for possible interference, noise sources and voltage drop).
Particular care is required with cables of over 40 m in length, the manufacturer should be
consulted if necessary.
A low-resistance connection between PE and the mounting rail should be provided. Transient
interference is transmitted from the module directly to the mounting rail and from there to the
local earth.
Power should be supplied by a regulated power supply unit (typically a PELV system complying
with IEC 364-4-4* secure low voltage). The low internal resistance of regulated power supplies
gives better interference voltage dissipation, which improves the signal quality of high-resolution
sensors in particular. Switched inductances (relays and valve coils) connected to the same power
supply must always be provided with appropriate overvoltage protection directly at the coil.







































































