



























Start-up Manual
89475/119 ETM
30
Duplomatic MS S.p.A.
All rights reserved.
Parameter
S
is used as emergency
stopping ramp
when disabling the START signal. After disabling,
a new target position (current position plus D:S) is calculated in relation to the speed and is
specified as a command value.
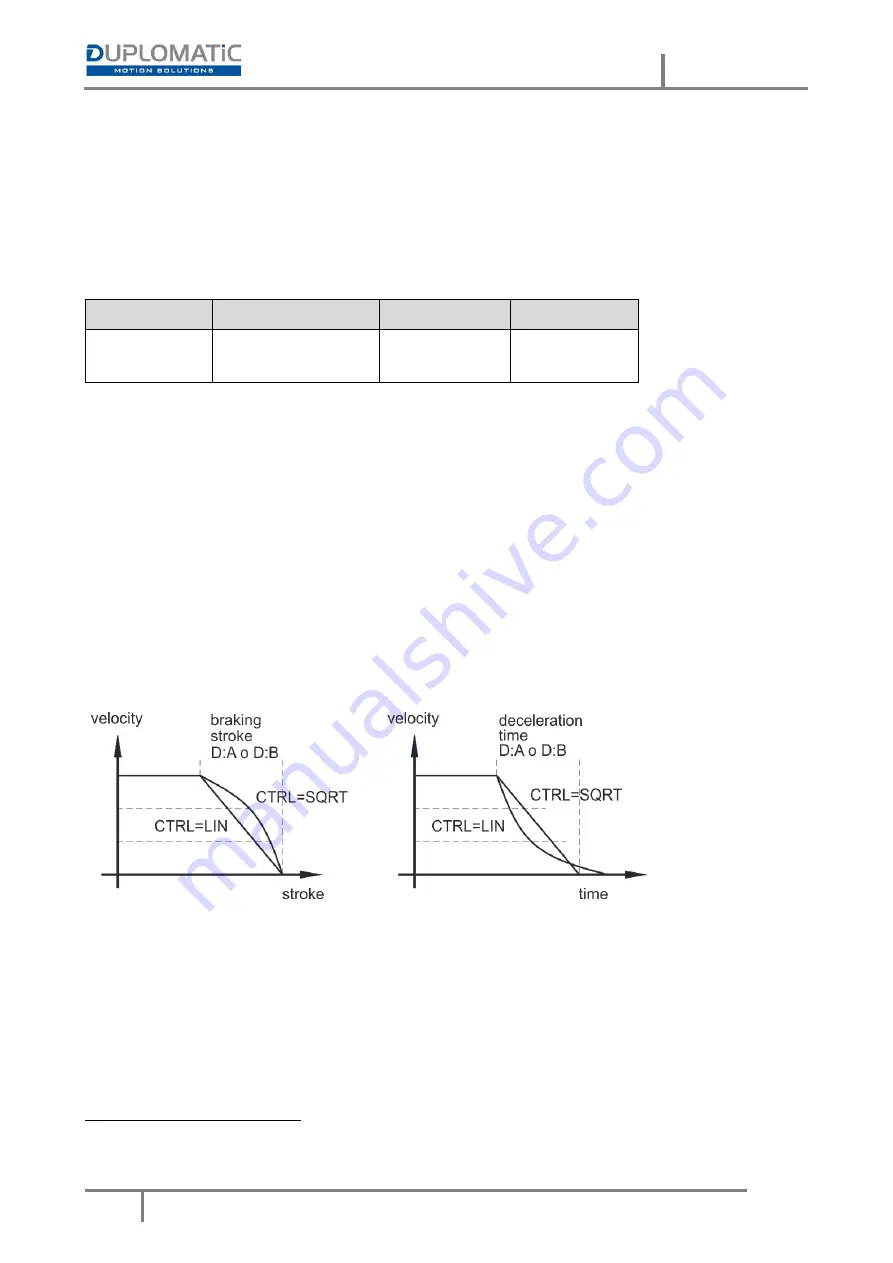
CTRL (braking characteristics)
Command
Parameters
Unit
Group
CTRL_1
X
CTRL_2
X
x= lin|sqrt1|sqrt2 -
POS_1
POS_2
The deceleration characteristic is set with this parameter. The SQRT function should be used with
positively overlapped proportional valves. The non-linear flow function of these valves is linearized
by the SQRT
4
function.
Zero lapped valves (control valves and servo valves) require either LIN or SQRT1 function
regardless of the application. The progressive characteristic of the SQRT1 function has better
positioning accuracy but can also lead to longer positioning times in individual cases.
LIN
: Linear deceleration characteristic (gain is increased by a factor of 1).
SQRT1
: Root function for braking curve calculation. The gain is increased by a factor of 3 (in the
target position). This is the default setting.
SQRT2
: Root function for braking curve calculation. The gain is increased by a factor of 5 (in the
target position). This setting should only be used with a significantly progressive flow through the
valve
4
The SQRT function generates constant deceleration and thus reaches the target position faster. This is
achieved by increasing the gain during the deceleration process.







































































